電(diàn)動葫蘆電氣控製電路實(shí)驗
電動葫蘆電氣控(kòng)製電路實驗-實驗目的:
1、學習並掌握電動葫蘆的提升和移行機構(gòu)電氣控製的方法。
2、學習用限位開關對三相異步電動機進行能耗製動並觀察其製動(dòng)效果。
二、選用組件:
1、實驗設(shè)備
|
序 號 |
型 號 |
名 稱 |
數 量 |
|
1 |
DQ39 |
繼電接觸控製掛箱(一) |
1件 |
|
2 |
DQ39-1 |
繼電接觸控製掛箱(xiāng)(二) |
1件(jiàn) |
|
3 |
DQ39-2 |
繼電接觸控製掛箱(三) |
1件 |
|
4 |
DQ10 |
三相鼠籠異(yì)步電動機(jī)(△/220V) |
1件 |
|
5 |
DQ18 |
三相雙速異步電動機(低速) |
1件 |
2、屏上掛件(jiàn)排列順序
DQ39、DQ39-1、DQ39-2
三、實驗方法:
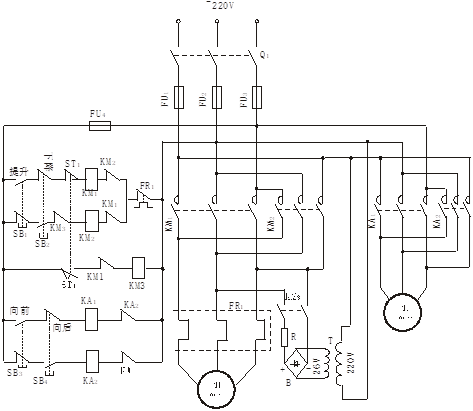
圖1電動葫蘆(lú)控製電路圖
1、調節三相可調輸出線電壓220V,按(àn)下(xià)“關”按鈕,按圖7-23接線。圖中SB
1、SB
2、SB
3、KM
1、KM
2、KM
3、FR
1、T、B、R選用DQ39掛件,Q
1、FU
1、FU
2、FU
3、FU
4、KA
1、KA
2、SB
4、ST
1選用DQ39-1掛件。M
1選用DQ10電機,M
2選用DQ18電機。先對熱繼電器的整定電流進行(háng)調(diào)整,調整在M
1三相鼠籠式異步電動機(jī)的額定電流0.5A位置。
2、M
1異步電(diàn)動機裝在導軌上,M
2鼠籠電(diàn)動機放在實驗桌的台麵(miàn)上,分(fèn)別(bié)模擬升降、移(yí)行電動機。
3、線路連接完(wán)成,經指導教師檢查無誤後,方可按下列步驟進行(háng)通電實驗。假定(dìng)電動機M
1提升(shēng)為順時(shí)針轉向,電動機M
2向前移行(háng)為順時針轉
向,則按SB
1及SB
3應符(fú)合轉向要求,若(ruò)不符合要求,應調整相序使電機(jī)轉向符合(hé)順時針的假定要求。
4、按SB
2及(jí)SB
4、M
1及M
2的轉向應符(fú)合逆時針轉向要求,在電機M
1 運轉的狀態下,按ST
1即對電機能耗製動,觀察電機應很快停(tíng)轉,以模擬實際電葫蘆(lú)的升降電動機(jī)停機時,必須有製動電磁鐵(tiě)(即抱閘)將其軸卡住,能使重物懸掛在空中。
5、再次操作各(gè)按鈕,先按SB
2,M
1電機逆時針轉向(下降),再按SB
3,M
2電機順時針轉向(向前),改為(wéi)按SB
4,M
2電機逆時針轉向(向後),鬆開各按鈕,電機應停止運轉;按SB
1,M1電機順時針運轉 (提升),按10秒鍾(模擬電機已提升到最高位),此時(shí)按ST
1 (模擬提(tí)升到最高位碰撞限位開關ST
1), 電機應很快(kuài)停止運轉。
6、為(wéi)了(le)在(zài)實際操作中保證安全,要求(qiú)每次隻(zhī)按下一個按鈕, 以使重物升降時不作移行運行,或在移行(háng)運行時不(bú)使重物作升降運動。也可設想在電路中加聯鎖使操作更安全。
四、電動(dòng)葫蘆電氣控製(zhì)電(diàn)路實驗討論(lùn)題:
(1)為什麽在電動葫蘆控製電路中,按(àn)鈕要采用點動控製?
(2)在圖中,行程開關ST
1起到什麽作用?


 品牌理念
品牌理念  標準流程
標準流程  有效溝通
有效溝通 專業管理
專業管理 優秀團隊
優秀團隊 品質保證
品質保證 無憂(yōu)售後
無憂(yōu)售後 