

液壓與氣動綜合(hé)PLC控製實驗設備,液壓與氣動綜合PLC控製實驗台,液
2026-01-15 08:43隨著工業技術(shù)的快速發展,可(kě)編程序控製器(PLC)廣泛應用在液壓係統控製與監(jiān)控方麵。目前液壓實驗台設備主要是由電(diàn)氣控製係(xì)統與液壓運行裝置2個部分組成,實驗台計算機控製係統的軟(ruǎn)硬件都是基(jī)於Win7係統的(de),存在內容固定、控製(zhì)方(fāng)式(shì)單一、柔(róu)性差等(děng)缺陷(xiàn)。因此(cǐ),本文采用PLC對液壓實(shí)驗台進行改造(zào),以滿足相關液壓實驗的需求。

一、係統(tǒng)的改造:
1.實驗台的組成
實驗(yàn)台主要由2個部分組成:電氣控製(zhì)係統與液壓運行(háng)裝置(zhì)。實驗台有(yǒu)2個泵:1個(gè)定量泵和1個變量泵,其各配有1個電動機。在實驗台上(shàng)拚裝實(shí)驗係統,實(shí)驗台油路連接采用快速接頭,搭建換接不同的液壓回路。為了滿足(zú)當前(qián)液壓實驗的需(xū)要,在(zài)進行液壓實驗台的電氣控(kòng)製係統改(gǎi)造(zào)中,在原有繼電器(qì)控製係統的(de)基礎上,設計了轉換接口,加入了PLC控製係統。
2.主(zhǔ)電路設計
實(shí)驗台(tái)以(yǐ)三相交流電為動力,電動機M1和M2分別采用直接啟動方式,其中M1拖動定量泵,M2拖動變量泵。改造後的液壓實驗台要求能夠根據需要選擇合適的液壓泵,因而拖動泵的電動機要求能夠(gòu)進行正轉運行、點動控製。改造後的實驗台電氣控製原理如圖1 所示。
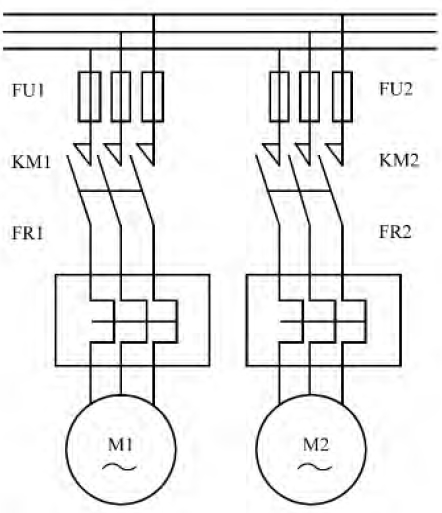
圖1 電氣(qì)原理圖
二(èr)、PLC控製係統設計:由液壓實驗台的控製係統可知,把指令信(xìn)號作為PLC的輸入,由PLC輸出的控製信號則驅動實驗裝置上各個電(diàn)磁(cí)閥的電磁鐵,進而控製液壓係統(tǒng)油路的流動方向,從而使實驗台處於不同的工作狀態,達到控製係(xì)統的目的。
通過對液壓係統控製(zhì)要求(qiú)的分析可知,PLC的輸入元件包括總啟動SB0,總停止SB1,2個電動機(jī)啟動SB2、SB3,2個電動機停止SB4、SB5,手動、自動選擇切換開關SA,4個行程開關SQ1~SQ4以及2個電磁鐵控製(zhì)按鈕(niǔ)SB6、SB7;輸出元件包括指示燈HL,2個繼電器線圈KM1、KM2,4個電磁鐵線圈(quān)YA1~YA4。係統(tǒng)共(gòng)有13個(gè)開關量輸入點,7個開關(guān)量輸出點,所以選用FX2n-32MR-001型PLC,PLC的I/O地(dì)址分配見表(biǎo)1,I/O分配(pèi)圖如圖(tú)2所示。
| 輸入元件 | 地址 | 輸出元件 | 地(dì)址 |
| 總啟(qǐ)動SB0 | X0 | 指(zhǐ)示燈HL | Y0 |
| 總(zǒng)停止SB1 | X1 | 繼(jì)電器KM1 | Y1 |
| M1 啟動SB2 | X2 | 繼(jì)電器KM2 | Y2 |
| M2 啟動SB3 | X3 | 電磁鐵YA1 | Y3 |
| M1 停止SB4 | X4 | 電磁鐵YA2 | Y4 |
| M2 停止SB5 | X5 | 電磁鐵YA3 | Y5 |
| 手動/自動選擇開關SA | X6 | 電磁鐵YA4 | Y6 |
| 行程開關SQ1 | X7 | ||
| 行(háng)程(chéng)開關SQ2 | X10 | ||
| 行程開關SQ3 | X11 | ||
| 行程開關SQ4 | X12 | ||
| 電磁鐵YA1 得電按鈕SB6 | X13 | ||
| 電磁鐵YA2 得電按鈕(niǔ)SB7 | X14 |
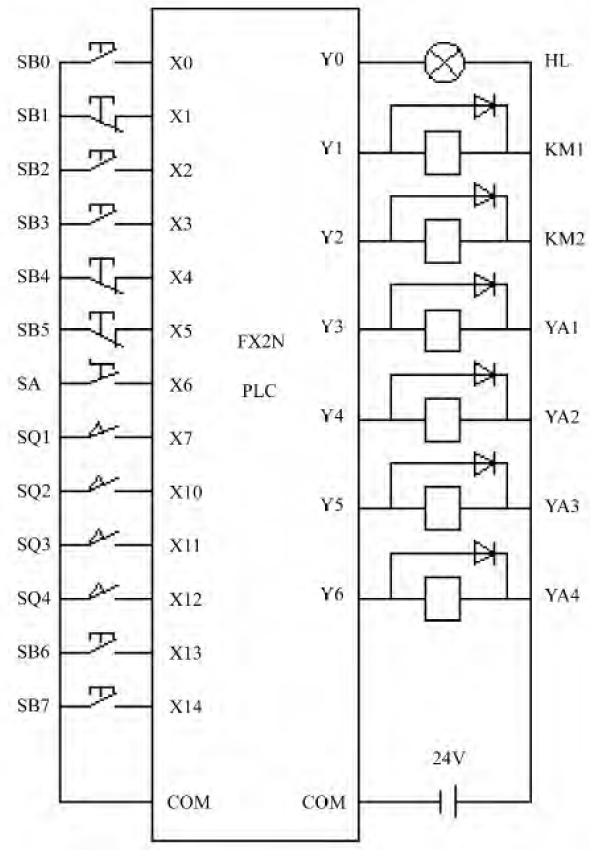
圖2 I/O分配圖(tú)
三、功能(néng)的實現(xiàn):以計算機作為上位機、PLC作(zuò)為下位機來(lái)控製的液壓實驗台,可以作為液壓元件性能試驗和液壓回路實驗的平(píng)台。在學習液壓傳動與氣壓傳動知識的基礎上,也可以自(zì)行編(biān)寫PLC程序,設計更(gèng)多(duō)的液壓回路,實現對液壓基本回路的自動控製。
1.液壓回路係統圖
速度換接回路的(de)作(zuò)用是使執行元件在一個工作循環中從一種速度切換到(dào)另一種速度。用2個調速閥串聯,調速閥Ⅱ的流量比調(diào)速閥I 的流量小,從而實現2 種慢速的(de)換接,如(rú)圖3 所示。
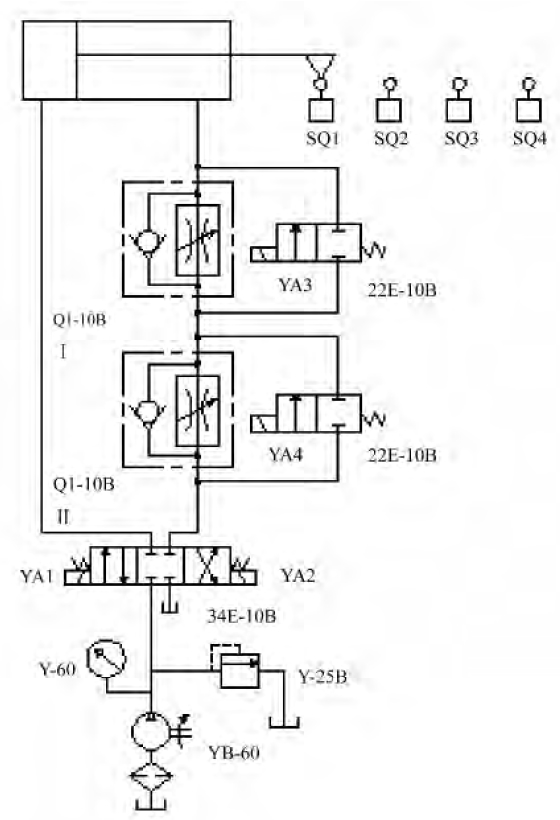
圖3 速度換接的(de)液壓回路係(xì)統圖
對液壓回路係統圖以及表1進行分析可知,在自動情況下,按相應的按鈕,將定量泵啟動,然後將控(kòng)製麵(miàn)板上(shàng)的手動/自動開關轉到自動位置。在控製(zhì)麵板(bǎn)按下SB7按鈕,YA2得電(diàn),活塞杆快速返回,直至壓到行程(chéng)開關SQ1時,即活塞杆到原位,此時YA1、YA3、YA4得電,活塞杆實(shí)現快進,當壓到行程開關SQ2時,YA1、YA4得電,進油路走調速閥I,活塞慢速(sù)實現一工進(jìn);當壓到行程開關SQ3時,YA1得電,此時進(jìn)油路走調速(sù)閥Ⅰ、Ⅱ,活塞慢(màn)速實(shí)現(xiàn)二工進;當壓(yā)到行程開關SQ4時,YA1失電,YA2得電,油路反(fǎn)向,活塞杆快速返回;當壓到行程開關SQ1時,即活塞杆停止在原位,液壓缸原位卸荷。
3.元件動(dòng)作順(shùn)序表
對液壓係統圖中各動作過程進行分析可知該係統的工作情(qíng)況:快進---一工(gōng)進---二(èr)工進(jìn)---快退,從而得出該液壓回路元件(jiàn)動作順序,見表2。
| 步號 | 動(dòng)作 | YA1 | YA2 | YA3 | YA4 | 輸入信號 |
| 0 | 缸快進 | + | - | + | + | SQ1 |
| 1 | 缸一工進 | + | - | - | + | SQ2 |
| 2 | 缸二(èr)工進 | + | - | - | - | SQ3 |
| 3 | 快退 | - | + | - | - | SQ4 |
表2 元件動作順(shùn)序表
4.PLC 的控製程序根據上述分析,在(zài)計算機上采用GX Developer三菱軟件編寫程序,編好後,進(jìn)行(háng)運行監控。使(shǐ)用三菱編程電纜連接PLC的通信接口與計算機接口(kǒu),設置好通信參數,將梯形圖下載到PLC。速度換接回路梯(tī)形圖如圖4 所示。







