

機器人柔性製造實訓平(píng)台,機器(qì)人(rén)柔性製(zhì)造實訓設備,機(jī)器人(rén)柔性製造
2020-09-22 10:36一、機器人柔性製造實訓平台,機器人柔性製造實訓設備,機器人柔性製造實訓裝置概述(shù)
隨著科學(xué)技術的迅速發展,新產品不斷湧現(xiàn),產品的複雜程度也隨之增加,而(ér)產品的市場(chǎng)壽命日(rì)益縮短,更新(xīn)換代加速,中、小批量生產占(zhàn)有越來越重要的地位。麵臨這—新的局麵,必須大幅度提高製造柔性和生產效率,縮短生產(chǎn)周期,保證產品質量,降低能耗,從而降低生產成本,以獲得更(gèng)好的經濟效益。柔性(xìng)製造係統正是在這種形勢下應運而生的。
柔(róu)性製造係統是由數控加工設備、物(wù)料運儲(chǔ)裝置和計算機控製係統等組成的自動化製造係統。它包括多個柔性製造單元,能根據製造任務或生產環境的變化迅速進行調整,以適宜於多品種、中小批量生產。它(tā)通過(guò)簡單地(dì)改變軟件的方法(fǎ)能夠製造出多種零(líng)件中任何一種零件。
係統主(zhǔ)要由八個單元模塊組(zǔ)成:
(一)係統總控單元(yuán);
(二)機器人單元;
(三)上下料搬運機器(qì)人單元;
(四)柔性製造加工單元(yuán);
(五(wǔ))檢測與分類識別單元;
(六)自動化立體倉庫、碼垛機單元;
(七)自動化輸送線係統單元(yuán);
(八)輔助功能單元。
所有模塊單(dān)元通過工業總線控製聯接。
本係統立(lì)足於真實零件的加工工藝,可以完成基於車削加工、銑(xǐ)削加工(gōng)的零件製造。同時(shí)通過該係統,學生可了解柔性製造係統的(de)基本(běn)組成和基本原理,為學生提供一個開放性的,創新性的和參與性的實驗(yàn)平台,讓(ràng)學生全(quán)麵掌握機電一體(tǐ)化技術的應用開發和集成技術,幫助學生從係統整體角度去認識係統(tǒng)各組成部分,從而掌握機電控製係(xì)統的組成、功能及控製原理。可以促進學生在機械設計、電氣自動化、自動控製、機器人技術(shù)、計算機技術、傳(chuán)感器技術等方麵的學習,並對電(diàn)機驅動(dòng)及控製技術、PLC控製係統的設計與應用、計算機網絡通信技術和現場總線技術(shù)、高級語言(yán)編程等(děng)技能得到實際的訓練(liàn),激發學生的學習興趣,使學生在機電係統的設計、裝配(pèi)、調試能力等方麵(miàn)均能得到綜合提高。該係統設(shè)計有漏電保護、短路保護、急停保護、限位(wèi)保護、隔離保護等多種保護功能(néng)。
二、機器人柔性製(zhì)造實訓(xùn)平台,機器人(rén)柔性製造實訓設備,機器人柔性製造實訓裝置係統特點
(一)高度集成
通過(guò)Profibus-DP工業現場總線及(jí)開發型組態軟件等網絡通訊技(jì)術將係統中的所有單機模塊設備進(jìn)行高度的集成(chéng)。與工(gōng)業現場(chǎng)形式完全相同。
(二)工業(yè)化、標準化、組合化
按工業級標準設計,全部軟、硬件按(àn)工業級標準選用或製造,並可全麵兼容(róng)標準工業級設備。各功能模塊既相對獨立,又可係統關聯。同時,也可根據後期零件加工的實際需求,組合擴展其他功能(néng)模(mó)塊。
(三)單元模塊化
係統中的單元設備(bèi)具有“聯機/單機”兩種操作模式。所有(yǒu)的單(dān)元設備(bèi)的軟硬件均可以脫離係統獨立操作,可用單機設備為平(píng)台,進行單項技術的研(yán)發,易擴展。既方便教學,又最大(dà)程度的(de)滿足了教師進行科研(yán)、學生進行創新的需要。
(四)機器人(rén)嵌入式係統控製
六自(zì)由度(dù)機器人等(děng)關鍵設備采用嵌入式係統控製。係統緊湊小巧,對實時(shí)和多任務有(yǒu)很強的支持能力,能完成多任務並且有較短的中斷響應時間。具有功能很強的存儲區保護功能,便於學生動手(shǒu)操作和係(xì)統維護。
(五)開(kāi)放性
開放(fàng)具有自(zì)主知識產權的軟件源代碼。此外,係統(tǒng)中以運動控製技術(shù)為主的單元裝備(bèi)需具有良好的硬件開放性,可以和工業上眾多裝備接口(kǒu),進行係統集成(chéng)。軟件係統采用開放式源代碼和通用軟件(jiàn)開發平台(MS VC++和(hé)Borland C++),用(yòng)戶(hù)可以進行深層次的軟件係(xì)統二次開發,以便於開(kāi)發出適合用戶(hù)需求的係統調度程序和單機運行程序(xù),很大程度上方便了老(lǎo)師和同學課題研(yán)究工作。
(六)網絡化視頻監控(選配)
係統提供網絡化視頻(pín)監控模塊,使操作者在操作係統的同(tóng)時,也可通過電腦屏幕實時觀(guān)看係統的實際運行狀況。同時對於有條件的學校,可將(jiāng)控製計算機與校園(yuán)網相連(lián)解,使更多的學生(shēng)和(hé)老師通過(guò)網絡觀看現場實(shí)驗過程,提高係統利用率,也可實現遠程教(jiāo)學。
(七)可(kě)擴展(zhǎn)性
係統軟、硬(yìng)件部分預留擴展(zhǎn)空間,用(yòng)戶可在原有係統基礎上增添設備模塊,並(bìng)可輕鬆(sōng)集成到係統中,為二次開發和擴展教學學科創造了極為有利條件。
(八)交互式圖形化操作界麵
係(xì)統控製(zhì)軟件采用WINDOWS操作係統,具有交互式和圖形化特點,操作(zuò)簡單易(yì)學,自動化程度高,使教師和學生在很短的(de)時間之內就可以掌握對係統的操作。
(九)豐富的狀態反饋功能
通(tōng)過計算機與各單元及傳感器的通訊,將係統(tǒng)中各環節的(de)狀態顯示在操作界(jiè)麵上,使操作者通過計算機隨時了解係統各環節的工況、狀態、運行數(shù)據,掌握係統運行狀態。
(十)完善的生產及物(wù)料存儲統計功能
根據(jù)現代柔(róu)性製造係(xì)統的特點及發(fā)展動向,不但在工作過程和原(yuán)理上仿真實際生產過(guò)程(chéng),而且開發了生產及物(wù)料存儲數(shù)據庫,根據係統的運行隨時記錄和分析生產過程和存儲數據。
(十一)完善的保護功能
該係統設計有漏(lòu)電保護、短路保護、急停保護、限位保(bǎo)護、隔離保護等多種保(bǎo)護(hù)功能(néng)。保證安全有效(xiào)的進行教學演示和授課。
三、機器(qì)人柔性製造實訓(xùn)平台,機(jī)器人柔性製造實訓設備,機器人柔性製造實訓裝置可開設的實驗內容
(一)柔性製造係統的認識實驗(yàn)
(二)機器人技術和應用(yòng)實驗
(三)傳感器技術的應用實驗
(四)Profibus-DP工業總線技術實驗
(五)視覺識別技術(shù)的應用實驗
(六)交(jiāo)流伺服、步進的電機應用實驗
(七)交流(liú)變頻技術的應用實驗
(九)多軸運動控製器實驗;
(十)氣動技(jì)術實驗;
(十一)數控加工(gōng)工藝技術實驗
(十二)計算機控製係統的(de)應用實驗
各單機運行模塊還可(kě)以開(kāi)設各相關專業技術實驗,將在下列模塊單元(yuán)中介紹。
四、機器人柔性製造(zào)實訓平台,機器人柔性(xìng)製造實訓設備,機(jī)器人柔性製造(zào)實訓裝置適用範圍
本係統包含多種學科專業知識,具有開放性、創新性、可操作性等特點,可用於各類中專、大專(zhuān)、本科和研究生的實驗教學和科研工(gōng)作。一般(bān)適用於以下專業的學生和(hé)老師:
電氣工程及其自動化;機(jī)械(xiè)設計製造及其自動化;機電一體化;機械電子工程;機械設計及理論;電子科學與技術;測控技術(shù)與儀器;計算機科學與技術;計算機應用技術
五、機器(qì)人柔性製造實訓(xùn)平台,機器人柔性(xìng)製(zhì)造實訓設備,機器人柔性製造實訓裝置柔性製造係統圖
5.1、本案例方案圖
圖5-1 係統(tǒng)效果圖(tú)標注
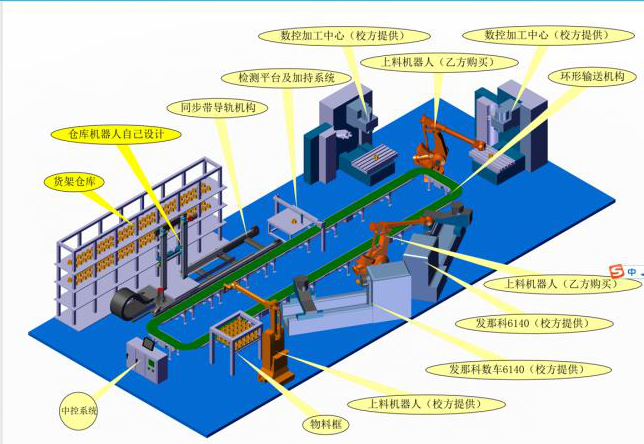
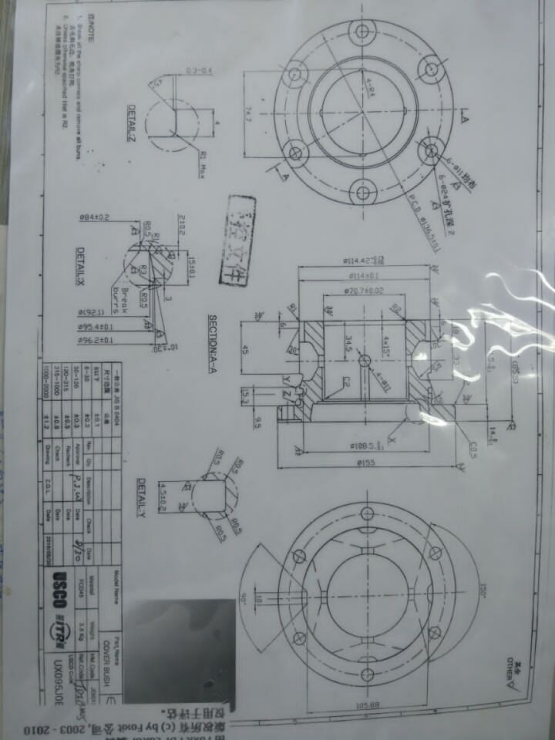
圖5-2 係(xì)統加工零件工程圖
5.2、公司關聯產品案例
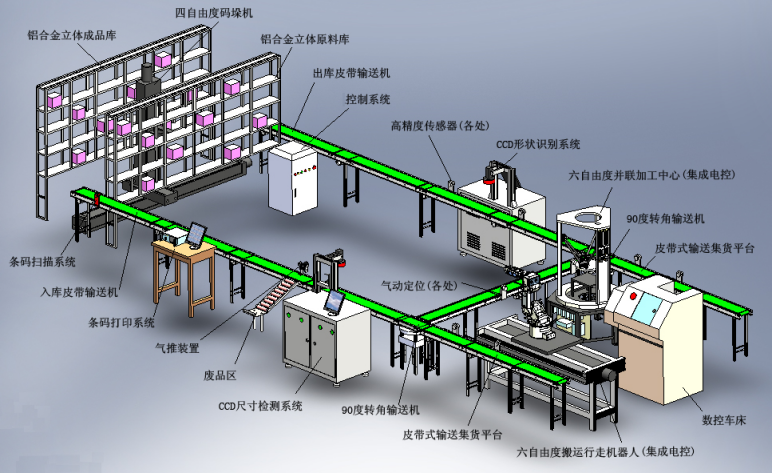
圖5-3 教學型柔(róu)性製造係統(tǒng)效果圖

圖5-4 H型教學(xué)型柔性製造係統係統實物圖
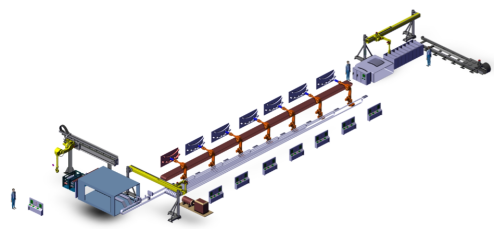
圖5-5 汽車(chē)板簧自動化生產線效果圖
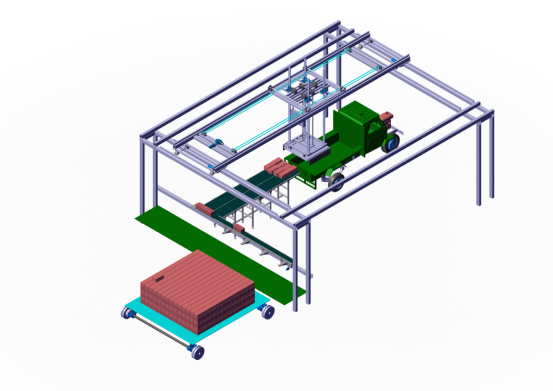
圖5-6自動搬磚機效果圖
六、機器(qì)人柔性製造實訓平台,機器人柔性製造實訓(xùn)設備,機(jī)器(qì)人柔性製(zhì)造實訓裝置柔性製造係統流程簡介(jiè)工件或毛坯由搬運機械(xiè)手從(cóng)自動化立體倉庫單元的毛(máo)坯庫中取出,送到自動化輸送係統單元(yuán)輸送線上。皮帶運輸機將工件或毛(máo)坯送至識別單元處停止,由識別單元對工(gōng)件進行識別分類。形狀識別結束(shù),工件向下運送至(zhì)輸送機的暫存區,再由機器人抓取(qǔ)工件,送入相應的柔性加工單元(加工中心或數控(kòng)車床(chuáng))進行加工。加工完成後,由上下料搬運機器人取出工件(jiàn),將工件放回(huí)到輸送線上。工件被運送到檢測與分類單元,對已(yǐ)加工的工件進行尺寸及位置偏(piān)差檢測。檢測結束,工件被運送到分揀單元(yuán),不(bú)合格的產品由氣推裝置送到廢品存放處(chù)。合格的產品將繼續傳送至自動化立體倉庫。根據係統數據,碼垛機將工(gōng)件從輸送機上取下並送(sòng)至自動化立體倉庫單元的成品庫,完成一個工作流程(chéng)。
七(qī)、機(jī)器人柔性製造實訓平台,機器人柔性製造實訓設備,機器人柔性製造實訓裝置係統單元介紹
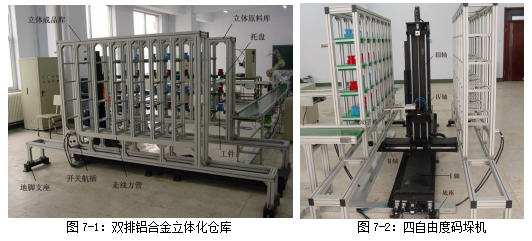
7.1.自動化立體倉庫、碼垛機單元
7.1.1.設備組成
由優質鋼結構型材搭建的立體化倉庫,與(yǔ)四自由度碼垛機及光電(diàn)傳(chuán)感器組成,完(wán)成原料(liào)及成品件的取出和存放。並由傳感器完成庫存信息的發送。
7.1.2.公司(sī)產品案例
立體化(huà)倉庫技術指標
| 立(lì)體化(huà)倉庫 | 倉位尺寸 | 570mm×500mm×450mm(可根據需求定製數量) |
| 倉位數量 | 8列(liè)4層32個(gè)(可根據(jù)需求定製數量) | |
| 外形尺寸 | 6000mm×2000mm×2500mm |
四自由度碼垛機技術參數
| 機構形態 | 直角(jiǎo)坐標式 | |
| 自由度 | 4 | |
| 負(fù)載 | ≥50kg | |
| 每軸重(chóng)複(fù)定位精度 | 0.5mm | |
| 運動分辯率 | 0.2mm | |
| 動作範圍 | Ⅰ軸行程 | 6000mm |
| Ⅱ軸(zhóu)行程 | 2000mm | |
| Ⅲ軸行程 | 2500mm | |
| Ⅳ軸轉(zhuǎn)動 | -100°~ +100° | |
| 出入庫流量 | 25秒/個;(根據作業要(yào)求製(zhì)定) | |
| 最大速度 | 水(shuǐ)平運行速度0 - 240m/min (變頻(pín)調速),起升(shēng)速度0-60m/min (變頻調速); | |
| 本體重量 | 350kg | |
| 輸入電壓(yā) | AC220V50Hz | |
| 定位方式 | 光電認址,旋轉編碼 | |
| 控製(zhì)方式 | 二伺(sì)服電機二步進電機(jī) | |
| 運行模(mó)式 | 手動;半自(zì)動;單機自動;聯機自動 | |
| 安裝環境 | 溫度 | 0~+45oC |
| 濕度 | 20~80%不結露 | |
| 振動 | 0.5G以下 | |
| 其它 |
避免易燃、腐蝕性氣體、液體 勿濺水、油、粉塵等 勿接近電器噪聲源 |
|
7.1.4.本單(dān)元係統配置
| 序(xù)號 | 名稱 | 單位 | 數量 | 品牌或廠家 | 備注 |
| 1 | 原(yuán)料庫 | 個 | 1 | 上海红桃视频app(yù) | |
| 2 | 成品庫 | 個 | 1 | 上海红桃视频app | |
| 3 | 四自由度碼垛機 | 台 | 1 | 上海红桃视频app | |
| 4 | 對射開關 | 對 | 1 | 國產 | |
| 5 | PLC及擴展單元 | 套(tào) | 1 | 歐姆龍 | |
| 6 | 控製係(xì)統 | 套 | 1 | 上海红桃视频app |
一(yī)、PLC控製係統應用實驗
二、步進或(huò)伺(sì)服電機控製特性實驗;
三、計算機網絡通信技(jì)術;
四、VC、VB等高級語言編程。
五、位置控製、速度控製等實驗;
六、多軸運(yùn)動控製器實(shí)驗;
7.2.檢測與分類識別單元
7.2.1.組成及(jí)功能
由檢測識別有關傳感器以及處理軟件和其它設備(bèi)(支架、工作台等)能夠組成一(yī)個相對完整的檢測識別(bié)係統,硬件之間應匹(pǐ)配。處理軟件(jiàn)能快速識別用戶(hù)所規定工件的外形元素,所提供設備等同或優於參考型號產品的性(xìng)能。
7.2.3.本單元係統(tǒng)配(pèi)置
| 序號(hào) | 技術描述 | 單(dān)位 | 數量 |
| 1 | 檢測識別係統 | 套 | 2 |
| 2 | 計算機 | 台 | 1 |
| 3 | 檢測識(shí)別處理軟件 | 套 | 1 |
| 4 | 自動定位(wèi)阻擋裝置 | 套 | 2 |
| 5 | 對(duì)射開關 | 對 | 2 |
一、圖(tú)象識別係統的應用實驗(yàn)
二、計算機網絡通信技術
三、VC、VB等高級語(yǔ)言編程
四、位(wèi)置控製、速度控製等(děng)實驗
7.3.柔性製造加工單元
7.3.1.設(shè)備組成
柔性加工單元(yuán)加工以車削加工、銑削加工(gōng)為主的軸(zhóu)類零件、盤類零件。柔性加工單元自(zì)用校方原有的2台數控車(chē)床、1台數(shù)控銑床、1台加工中心,通(tōng)過選定的技術改造和布局設(shè)置,按照零件加工工藝過程要(yào)求,合(hé)理而已加(jiā)工設備的順序、位置,從而(ér)滿(mǎn)足標(biāo)書中提出的1-3個零件加工的要求。
7.3.2.本單元係統配置
| 序號 | 名(míng)稱 | 單位 | 數量 | 備注 |
| 1 | 數控加(jiā)工中心 | 台 | 1 | |
| 2 | 發那科6140車床 | 台 | 2 | |
| 3 | 發那科7140銑床 | 台 | 1 | |
| 4 | 控製係統 | 套 | 1 | |
| 5 | 配(pèi)套自動(dòng)氣動(dòng)夾具 | 套 | 4 |
一、機械製造工藝(yì)相關實驗;
二、數控加(jiā)工編程實驗;
三、計算機控製;
四、位置控製、速度(dù)控製等實驗;
五、工件夾持與控製實驗;
六、實際加工實驗;
七、通(tōng)訊、故障診斷維修實驗;
八(bā)、安裝接線、調試參數設(shè)置實驗。
7.4.機器人單(dān)元
7.4.1.設備組成
機器人單元由搬運機器(qì)人1台和2台加工上料機械手以(yǐ)及其他有關軟、硬件組成。
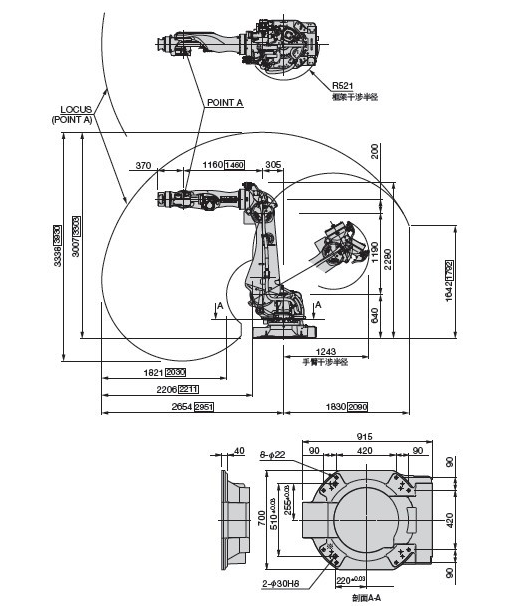
7.4.2.加工上料機器手技術參數
1、主體參數
| 項(xiàng)目 | 規格 | |
| 機器人型號 | ||
| 結構 | 關節型 | |
| 關節數 | 6 | |
| 驅動方式 | AC伺服方式 | |
| 最大動作範圍 | J1 | ±3.14rad(±180°) |
| J2 | -1.40~+1.05 rad(-80°~+60°) | |
| J3 | -2.33~+2.62 rad(-133.4°~+150°) | |
| J4 | ±3.66rad(±210°) | |
| J5 | ±2.18rad(±215°) | |
| J6 | ±3.66rad(±210°) | |
| 最(zuì)大速度 | J1 | 2.01rad/s(115°/s) |
| J2 | 1.83rad/s(105°/s) | |
| J3 | 1.97rad/s(113°/s) | |
| J4 | 3.66rad/s(210°/s) | |
| J5 | 3.05rad/s(175°/s) | |
| J6 | 5.41rad/s(310°/s) | |
| 可搬質量 | 手腕(wàn)部 | 10kg |
| 第1手臂上 | 5kg | |
| 手腕允許靜(jìng)負載荷扭矩 | J4 | 83N·m |
| J5 | 83N·m | |
| J6 | 44N·m | |
| 手腕允許最大慣性力矩 | J4 | 8kg·m2 |
| J5 | 8kg·m2 | |
| J6 | 4kg·m2 | |
| 最大工作半徑 | ≥800mm | |
| 位置重複精度(dù) | ±0.04mm | |
| 安裝方式 | 場麵安裝 | |
| 安置條件 | 周圍溫度:0~45° | |
| 周圍(wéi)濕度:20~80%RH | ||
| 安裝麵允(yǔn)許振(zhèn)動:0.5G(4.9m/s2)以下(xià) | ||
| 主體質量 | ≥100kg | |
2、安裝示意圖
控製硬件:多處理(lǐ)器係統
主流工業控製總線
主流CPU
板上集(jí)成低功耗(hào)NS GX1 200MHz 到300MHz 處理器無風扇;
外(wài)部總線頻(pín)率:33MHz, BGA 封(fēng)裝芯片組Chipset
NS GX1/CS5530A/W83977F-A 二(èr)級(jí)Cache 集成於GX1 處理器內係統存儲器System Memory
一條SODIMM 插槽最大可支持1G 內存
內存類型SDRAM ( 同步DRAM)
IDE 功能
一個EIDE 接口最多可接(jiē)兩個設備支持(chí)PIO 模式3/4 或Ultra DMA33 IDE 硬盤和ATAPI CD-ROM/DVD-ROM
USB 功能
兩個USB 接口符(fú)合USB 規格Rev. 1.0
Bioses
Award Bioses 即插即用
512M (2Mbit) flash 內存芯片
備份電源
控製軟件:主流品牌機器(qì)人操作係統
強大的主流品牌編程語言
通用的文(wén)本格式
軟件出廠預(yù)裝,並存於光碟
·電源: AC 200-230v三相
·環境溫度:5°C- 45°C
·最大濕(shī)度:95%
·防護等級:IP54
·操作麵板:控(kòng)製櫃上
·安全性:緊急停止,自動模式停止,測試模式停(tíng)止等
·輸入輸出:數字式直流24V輸入輸出板
7.4.4.可開設的實驗內容
一、機器(qì)人的應(yīng)用
二、計算機(jī)網絡通信技術應用與實驗;
三、計算(suàn)機控製係統的學習與實驗;
四、位置控製、速度(dù)控製等實驗;
五、機器人正運動學分析實驗;
六、機器人關節運動軌跡規劃實驗;
七、機器人的PTP(點到點)運動軌跡規劃實驗;
八、VC、VB等高級語言編(biān)程;
九、機器人在柔性係統中的應用實驗
7.4.5.本(běn)單元係統配置
| 序號 | 名稱 | 單位 | 數量 | 備(bèi)注 |
| 1 | 六自(zì)由度機器人(負載20KG) | 台 | 2 | |
| 2 | 搬運機械人 | 台 | 1 | 校方原有 |
| 4 | 六自由度機器(qì)人底座 | 台 | 2 | |
| 5 | 氣動自動定(dìng)位(wèi)裝置(zhì) | 套(tào) | 2 | |
| 6 | 對射開關 | 對 | 2 | |
| 7 | 嵌入式控製係統 | 套 | 1 |
7.5.1.設備組成
本輸送係(xì)統由皮帶輸送機和轉角輸送機組成O型輸送係統,框架采用鋁合金框(kuàng)架,其結構簡單、重量輕,安裝(zhuāng)、使用、維護方便。每條皮(pí)帶運輸機由鋁合金支架、皮帶、輥筒、電(diàn)機(jī)與(yǔ)減速器組成,並且輸送機上裝(zhuāng)有位置傳感器。轉角(jiǎo)輸送部(bù)分由直流(liú)電機+減速(sù)器(qì)驅動,所有輸送機速度(dù)可調,係統中要有一條變頻調速輸送線。
7.5.2.功能特點
本輸送係統由O型組成進行工件的輸送,鋁合金框架,其結構簡單、重量(liàng)輕,安裝、使用、維護方便。
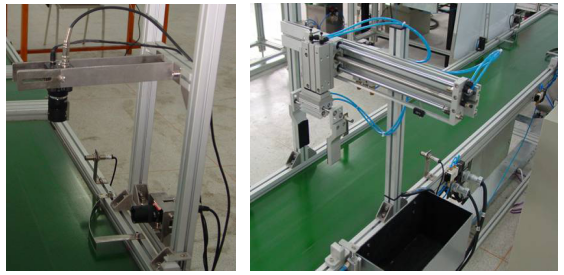
7.5.3.公司產品案例
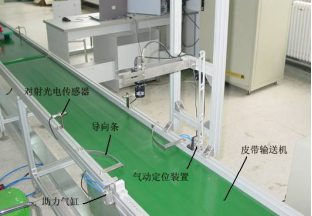
圖、皮帶輸送(sòng)機及附件

圖、
7.5.4.技術參數| 皮帶輸(shū)送機 | 有效工作寬度 | 300-400mm |
| 工作高度 | 750mm | |
| 有效區域 | 16米´6米 | |
| 運行速度 | 5m/min~10m/min | |
| 電機 | 1.5kw | |
| 承載能力 | 200kg | |
| 90度轉角輸送機 | 工作(zuò)高度 | 750mm |
| 旋轉角度 | 90度 |
7.7.5.本單元係統配置
| 序號 | 名稱 | 單位 | 數量 | 備注 |
| 1 | 皮(pí)帶輸送機(含電機(jī)、減速器(qì)、變頻(pín)器、支架等) | 套(tào) | 12套 |
4米:8套 3米:4套 |
| 2 | 90度轉角輸送機 | 台 | 2 | / |
| 3 | PLC及擴展單元 | 套 | 1 | / |
7.7.6.可開設的實驗內容
一、輸送機的應用與實驗;二、PLC編程實驗(yàn)
三、電機控製等有關實驗(yàn)
八、機器(qì)人柔性製造實訓平(píng)台,機器人柔(róu)性製造實訓設備,機器人柔性(xìng)製(zhì)造實訓(xùn)裝置工業總線控製係統
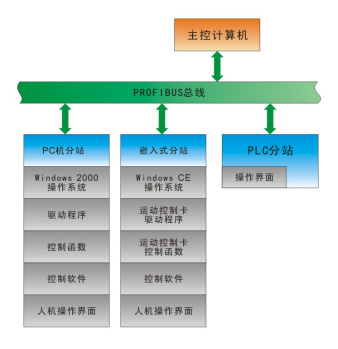
8.1.總線控製係統
係統總線控製係統由主控(kòng)計算機、工位計算機、嵌入式運動控製器、PLC等控製硬件組成。通過ProfiBus-DP總線同主控(kòng)計算(suàn)機控製中心做數(shù)據交換。
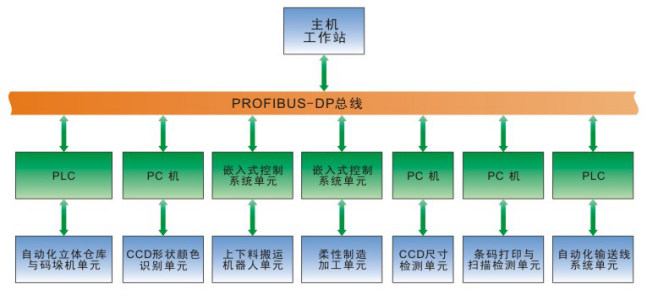
圖、控製係統組網圖
8.2.係統安全保護係統(tǒng)由於該係統(tǒng)中的轉動、移動、自動化的設(shè)備多,這對於建設一個國內先進的實驗室來說,係統的安全(quán)保護係統是非常重要的,係統中設計了多層次多重保護(hù)措施。
一、機械保護:對存在危險性機械,碼垛機、六自(zì)由的機器人等(děng)設置有機械碰撞強行停止運行的措施。
二(èr)、電氣停止保護:對存在危險性機械,設置有危險設置緊急電氣停止保護措施,如(rú)堆垛機上下限位、軌道起點(diǎn)、終點限位緊急電氣停止運行。
三、電氣減速運行保(bǎo)護:對運(yùn)動機械在(zài)上述危險位置前(qián)設置有緊急減速運行開關,以便使碼垛機、六自由度串聯機器人在危險位置就提(tí)前減速運行。
四、區域性安全保護:碼垛機、六自由度串聯機器人、六自由(yóu)度並聯機器人運行等區域,為避免產(chǎn)生危(wēi)險(xiǎn)後果,設置區域性報警、停止傳感器(qì)裝置,以便緊急停止運(yùn)行中的設備。
五、人工緊急停止:在現場管理人員附(fù)近設置人工緊急停(tíng)止按鈕,一(yī)旦出現不(bú)安(ān)全預(yù)兆,可按下“緊停”按鈕,緊急停止運行設備。
九、機器人柔性製造實訓(xùn)平台,機(jī)器人柔性製造實訓(xùn)設備,機器人柔性製造實訓裝置(zhì)控製軟件
9.1.控製軟件概(gài)述
軟件部分包括主控單元和各分(fèn)站控製單元,其中主控單元由(yóu)工業計算機及主控軟件(jiàn)組成,通(tōng)過ProfiBus-DP總(zǒng)線通訊采集各分站信息,並協調各(gè)個分站動作,同時實現人機交互界麵接受用戶控(kòng)製(zhì)和操作。
硬(yìng)件配(pèi)置:P4級計算機、內(nèi)存1G、19寸(cùn)純屏顯示器。
軟件運行平台:Windows NT4.0、Workstation 、Windows 2000、Windows XP。
軟件(jiàn)開發平台:Windows NT4.0、Workstation 、Visual C++ 6.0,Microsoft Access或SQL2000,組態王。
9.2.控製軟件功能
9.2.1.主控單元
係統提供可視化界麵,模塊內部(bù)負責實現工作流邏輯配置與時序控製,操作員在此可以操作係統的初始化、運行、停止工作,並開始整個物流係統的連續工作,同(tóng)時可以實時觀察到(dào)各個作業節點的工(gōng)作(zuò)狀況及(jí)工(gōng)件(jiàn)信息。
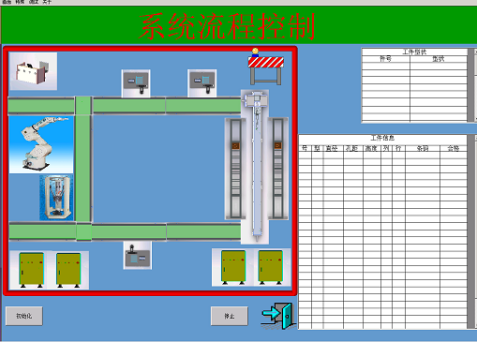
係統提供可視化界麵,操作員對各個倉庫的物料儲存狀態可以(yǐ)實時進行(háng)監(jiān)控。

係統提供可視化界麵,操作員可將物流係統分為若幹個作(zuò)業完成,其中分別包(bāo)括控製各(gè)個傳送帶裝置的運動、氣推裝置的(de)控製、立(lì)體倉庫碼垛機的控製、六自由度並聯加工中心的控製、數控車床控(kòng)製、六自由度搬運機器人的控(kòng)製、氣動分揀條碼檢測單元的控製以及電源開關的控製。
9.2.4.加工上料機器手控製
係統提供可視化界麵,操作員可以在此對加工上(shàng)料機(jī)器(qì)手進行運動控製,該模塊通過網絡通訊控製上下料搬運分站(zhàn)來實現動作。

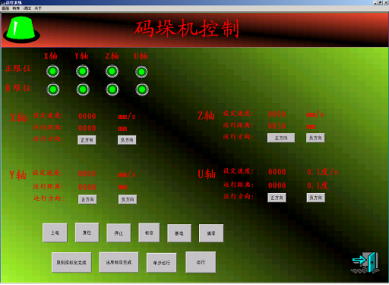
係統提供可視化界麵,操作員可以在此對四自(zì)由度碼(mǎ)垛機進行運動控製,該(gāi)模塊通過網絡通訊控(kòng)製四(sì)自由度碼垛機實現(xiàn)各軸動作。
設(shè)定操作員的不同權限,不同權限可(kě)以(yǐ)做不同的事情,例如:係統管理員可以使用所有功能而普通操作員隻(zhī)可以使用其中(zhōng)一項或幾項功能。
9.2.7.係統狀態
係統提供可視化界麵,操作員可以實時(shí)監控各個設備的工作狀態。其中包括各(gè)個裝置是否正在運行,各個裝(zhuāng)置是否(fǒu)已經通電。物流係統中正在分揀的各(gè)個物料的(de)所在(zài)位置(zhì)。
整體結構圖
十、機器人柔性製造實訓平台,機器人柔性製(zhì)造(zào)實訓設備,機器人柔性製造實訓裝置其他配件說(shuō)明10.1.計(jì)算機
計算機技術參數:主流(liú)品牌計算機
處理器(qì):英特爾奔騰D945雙核(hé)處理(lǐ)器(3.40GHZ,800MHZ前(qián)端總(zǒng)線,2×2MB二級緩存);
操作係統:正版windows XP專業版;芯片組:英特爾P965 Express芯片組內存;DDR 512M;硬盤:80G;光驅:DVDRW;圖形:256MB PCI,顯示器:19′液晶顯示器。
10.2.可編程控製器(PLC:S7-200 CPU224)
1、一般(bān)性能
S7-200 CPU224的(de)一般性能如下表所示。
S7-200 CPU224一般性能表
| 電源電壓 | DC 24V,AC 100~230V |
| 電源電壓波動 | DC 20.4-28.8V,AC 84-264V(47-63Hz) |
| 環境溫度(dù)、濕度(dù) | 水平安裝0~550C,垂直安裝0~450C,5~95% |
| 大氣壓 | 860~1080hPa |
| 保護等(děng)級 | IP20到IEC529 |
| 輸出給傳感器的電壓 | DC 24V (20.4-28.8V) |
| 輸出給傳感器的電流 | 280mA,電子式短路保護(600mA) |
| 為擴展模塊提供的(de)輸出電流 | 660mA |
| 程序存儲器(qì) | 8K字節/典型值為2.6K條指令 |
| 數據存儲器 | 2.5K字 |
| 存儲器子模塊 | 1個可插入的存(cún)儲(chǔ)器子模(mó)塊 |
| 數據後備 |
整個BD1在EEPROM中無需維護 在RAM中(zhōng)當前的DB1標誌位(wèi)、定(dìng)時器、計數器等通過高能電容或電(diàn)池維持,後備時間190h(400C時120h),插入(rù)電池後備200天 |
| 編程語言 | LAD,FBD,STL |
| 程序結構 | 一個主(zhǔ)程序塊(可(kě)以包括子程序) |
| 程序執行 | 自由循環。中斷控製,定時(shí)控製(1~255ms) |
| 子(zǐ)程序級 | 8級 |
| 用戶程序保護 | 3級口令(lìng)保護 |
| 指令集 | 邏輯運算、應用功(gōng)能 |
| 位操作執行時間 | 0.37μs |
| 掃描時間監控 | 300ms(可重啟動) |
| 內部標誌位 | 256,可保(bǎo)持:EEPROM中0~112 |
| 計(jì)數(shù)器 | 0~256,可保持:256,6個高速計數器 |
| 定時(shí)器 |
可保持:256, 4個定時器,1ms~30s 16個定時(shí)器,10ms~5min 236個定時器,100ms~54min |
| 接口 | 一個RS485通信接口 |
| 可(kě)連(lián)接的(de)編程(chéng)器/PC | PG740P = 2 \* ROMAN II,PG760P = 2 \* ROMAN II,PC(AT) |
| 本機I/O |
數字量輸入:14,其(qí)中4個可用作硬(yìng)件中斷(duàn),14個用於高速功能(néng) 數字量輸出:10,其中2個可用作本機功能, 模擬電位器:2個 |
| 可連接的I/O |
數(shù)字量輸入/輸出:最多94/74 模擬量(liàng)輸入/輸出:最多(duō)28/7(或14) AS接口輸(shū)入/輸出:496 |
| 最多可接擴展模塊 | 7個 |
S7-200 CPU224的輸入特性如下表所示。
S7-200 CPU224輸(shū)入特性表
| 類型 | 源型或匯型 |
| 輸入電壓 | DC 24V,“1信號”:14-35A,“0信號”:0-5A, |
| 隔離 | 光(guāng)耦隔離,6點和(hé)8點 |
| 輸入(rù)電流 | “1信號”:最大4mA |
| 輸入延遲(額(é)定輸入電(diàn)壓) |
所有標準輸入:全部0.2-12.8ms(可調(diào)節) 中斷輸入:(I0.0-0.3)0.2-12.8ms(可調節) 高速(sù)計數(shù)器:(I0.0-0.5)最大30kHz |
S7-200 CPU224輸出特性如(rú)下表所示。
表:S7-200 CPU224的輸出特性(xìng)
| 類型 | 晶體管輸出(chū)型 | 繼電器輸出型 |
| 額(é)定負載電壓 | DC 24V(20.4-28.8V) |
DC 24V(4-30V) AC24-230V(20-250V) |
| 輸出電壓 | “1信號”:最(zuì)小DC 20V | L+/L- |
| 隔(gé)離 | 光耦隔離(lí),5點 | 繼電器隔離,3點和4點 |
| 最大輸出電(diàn)流 | “1信號(hào)”:0.75A | “1信號(hào)”:2A |
| 最小(xiǎo)輸出電(diàn)流 | “0信號”:10μsA | “0信號(hào)”:0mA |
| 輸出(chū)開關容量 |
阻性負載:0.75A 燈負載(zǎi):5W |
阻性負載:2A 燈負載:DC30W,AC200W |
S7-200係列PLC是模塊式結構,可以通過配接各種擴展模(mó)塊來(lái)達到擴展功能、擴大控製能力的目的。目前S7-200主要有三大類擴展(zhǎn)模塊。
(1)輸(shū)入/輸出擴展模塊 S7-200 CPU上已經集成了一定數量的數字量I/O點,但如用戶需要多於CPU單元I/O點(diǎn)時,必須對(duì)係統(tǒng)做必要的擴(kuò)展。CPU221無I/O擴(kuò)展能力,CPU 222最多可連接2個擴展模塊(數字量或模擬量),而CPU224和CPU226最多(duō)可連接7個擴展模塊。
S7-200 PLC係列目前總共提供共(gòng)5大類擴(kuò)展模塊:數字(zì)量輸入擴展板EM221(8路擴展輸入);數字量輸出擴展板EM222(8路擴(kuò)展輸出);數字量輸入和輸出混合擴展板EM223(8I/O,16I/O,32I/O);模擬量輸入擴展板EM231,每個EM231可擴(kuò)展3路模擬量輸入通(tōng)道,A/D轉換時間為25μs,12位;模擬量輸入和輸(shū)出混合擴展模板EM235,每(měi)個EM235可同時擴展3路模擬輸入和1路模(mó)擬量輸出通道(dào),其中(zhōng)A/D轉換時間為(wéi)25μs,D/A轉換時間]100μs,位數均為12位。
基本(běn)單元通(tōng)過其右側的擴展接口用總線連接器(插件)與擴展單元左側的擴展接口相連接(jiē)。擴展單元正常(cháng)工作(zuò)需要+5VDC工作電源,此電源由基本單元通過總線連接器(qì)提供,擴展單元的24VDC輸入點和(hé)輸出點電源,可由基本單元的24VDC電源供電,但要注意基本(běn)單元所提供的最大電流能力。
(2)熱電偶/熱電阻擴展模塊 熱電偶、熱電阻模塊(EM231)是為CPU222,CPU224,CPU226設計的,S7-200與多種熱電(diàn)偶、熱電阻的(de)連接備有隔離接口。用戶通過模塊上的DIP開關來選擇(zé)熱電(diàn)偶或熱電阻的類型,接線方式,測量單位和開路故障的方向。
(3)通訊擴展(zhǎn)模(mó)塊(kuài) 除了CPU集成通訊(xùn)口外,S7-200還可以通過通訊擴展模(mó)塊連接成更大(dà)的網絡。S7-200係列(liè)目前有兩(liǎng)種通訊擴展(zhǎn)模塊:PROFIBUS-DP擴展從站模塊(EM277)和AS-i接(jiē)口擴展模塊(CP243-2)。
S7-200係列PLC輸入/輸出擴展模塊的主要技術性能(néng)如下表所示。
表:S7-200係列PLC輸入/輸出擴(kuò)展模塊的主要技術性能
| 類(lèi)型(xíng) | 數字量擴展模塊 | 模擬量擴展模塊 | ||||
| 型號 | EM221 | EM222 | EM223 | EM231 | EM232 | EM235 |
| 輸入點 | 8 | 無 | 4/8/16 | 3 | 無 | 3 |
| 輸出點 | 無(wú) | 8 | 4/8/16 | 無 | 2 | 1 |
| 隔離組點數 | 8 | 2 | 4 | 無 | 無 | 無 |
| 輸入電壓 | DC24V | DC24V | ||||
| 輸出電壓 | DC24V或AC24-230V | DC24V或AC24-230V | ||||
| A/D轉換時間(jiān) | <250μs | <250μs | ||||
| 分辨率 |
12bit A/D轉換 |
電壓(yā):12bit 電流:11bit |
12bit A/D轉換 |
|||
基本概述
產地: 亞太 品牌: 光控(kòng)豹 型號: HX-S121S1R2
套餐類型:官方標配 攝像(xiàng)頭類型:無攝像頭(tóu) 是否無線:有線 是否觸摸(mō)屏:觸摸屏 能效等級:一級 觸摸屏類型(xíng): 電阻屏
附加功能:內(nèi)置音箱、升降、可壁(bì)掛 屏幕尺寸:12英寸
售後(hòu)服務:三包 是否寬屏:否 垂直可(kě)視角度:145°
黑白響應時間:5毫秒 灰階響應時間:5毫秒 點距:0.291mm 麵板類型:TFT 接口類型:DC 音(yīn)頻 COM/USB
平均亮度:350cd/m^2 分辨率:800x600 水平可視角度(dù):145° 液晶屏種類:完美(měi)屏 屏幕比(bǐ)例:4:3 標稱對比度:450:1
屏幕類型:LED 是否(fǒu)自帶音箱(xiāng):是(shì) 適用場景:工業
參數性能
| 顯示參數 | 整機參數 | ||
| 屏幕尺(chǐ)寸 | 10.4寸(cùn) | 整機型號(hào) | HX-S104S1R2 |
| 屏幕(mù)比例 | 4:3(正屏) | 供電(diàn)方式(shì) | 12V-4A(外(wài)置(zhì):AC180-240V,50-60Hz) |
| 麵板類型(xíng) | 工控A+規屏 TFT | 最大功率 | 48W |
| 最佳分辨率 | 800*600 | 外觀顏色 | 黑色(sè) |
| 點距 | 0.264mm | 外殼材(cái)質 | 全金屬冷軋板 |
| 平均響應時間 | 5ms | 內置喇叭(bā) | 無 |
| 對比度 | 500:1 | 工作溫度/濕度 | 0-60度(20%-65%) |
| 顯示色彩 | 16.7M | 儲存溫度/濕度 | -10-60度(10%-75%) |
| 背光壽命 | 50000h | 語言菜單 | 簡體中文 |
| 平均亮度 | 300cd/m2 | 安裝(zhuāng)方式 | 可選 |
| 視(shì)角 | 75/75/75/75 | 節能保護 | 有(yǒu) |
| 觸摸參數 | 售後質保 | ||
| 觸(chù)摸(mō)類型 | 5線電阻屏單點觸摸(mō) | 接口類型 | DG(電源),VGA+DVI(視頻),USB(觸摸)等 |
| 感應力度 | 40g-250g | ||
| 觸摸次數 | ³3500萬次 | 支持係統 | Windows、androids |
| 表明硬度 | ³3H | 配件清單 | 電源適配器,VGA或DVI線,音頻線,觸摸驅動軟件(jiàn) |
| 觸摸方式 | 壓力感應 | ||
| 通訊接口 | USB或COM | ||
| 屏透光率 | ³90% | 保修時間 | 1年 |
| 屏分辨率(lǜ) | 2048*2048 | 保修方式 | 送修或(huò)寄修 |
1、係統占地麵積:≤6m×16m;
2、電源:三相五線:AC380V ,50Hz;電壓波動範圍±15%;單相:AC220V,50Hz;電壓波動(dòng)範圍±15%;
3、壓縮空氣運行壓力:0.4 -- 0.6MPa;
4、地坪載荷:³2T/M²;
5、房屋高度:³2.5 m;
6、毛坯或工件材(cái)料:鋼、有(yǒu)色金屬、工程塑料;
7、係統可同時(shí)滿足30-35名學生進行實驗;
8、係統各組成單元具有足夠的剛度,設備運行時不(bú)會產生幹擾(rǎo)正常教學的噪音。
9、工具櫃(guì):2台 規格:長×寬×高:900×390×1800mm,采(cǎi)用0.6mm冷軋鋼板(bǎn),表麵經磷化處(chù)理後采用靜電噴塑工藝,中間有兩個抽屜,抽屜上(shàng)下空間各分為兩層,上麵為(wéi)玻璃櫃門,下麵為鋼質櫃門。
十二、提供的文檔資料
12.1 係統實驗指導書機械篇
我公司提供的實驗指(zhǐ)導(dǎo)書機械篇不僅提供了教學(xué)大(dà)綱供學院參考(kǎo),而且(qiě)從係統單元層麵上(shàng)詳細介紹了每個模塊單元組成基本設備的設計思(sī)想、設計過(guò)程、工藝方法(fǎ)、結構組成、計算方法、與實驗相配套的教學內容,並在介紹本係統設備基礎上擴展到工業相關設備的基本(běn)知識。在每一個模塊或者設備介紹下,指導書還(hái)留有實驗作業,讓學生充(chōng)分掌握所了解和學到的專業知識,並具有較強的動手能力。
12.2 係統實驗指導書控製篇
與機械篇(piān)構成一(yī)樣,係統的介紹了整體及模塊組成設備(bèi)的控製原理和方法,闡述了本係統中(zhōng)包含的電氣控製與(yǔ)單(dān)片機直(zhí)至工(gōng)業控製領域內大多數自動控製知(zhī)識。並在係統知識範(fàn)圍內預設了課程試(shì)驗作業,讓學生在本專業課程基礎(chǔ)上提高自己。並了(le)解(jiě)和掌(zhǎng)握工業(yè)現場所(suǒ)應用到(dào)的(de)基本知識(shí)。
12.3 係統軟件使用說明書
係統軟件使用(yòng)說明書著重與軟件安裝使用和注意(yì)事項。並介紹二次(cì)開發相關知識,以(yǐ)及係統軟件基礎(chǔ)上增(zēng)加功能的示例(lì)等。軟件說明書還包含單個模塊,比如(rú)串聯和並聯機器人(rén)單獨使用的軟件說明書,並配備完善的恢複功能,學(xué)生或者教師可在軟(ruǎn)件基礎上任意合理更改,最終都能恢複到初始狀態。
12.4 機器人(rén)使用說明(míng)書
為單(dān)個機器人使用(yòng)時的硬件與使用說明書。
12.5 機(jī)器人實驗指導(dǎo)書
為單個機器人進行教學實驗的指導材(cái)料,包括機器人機(jī)械係統與控製係統的介紹,以及機器人正、逆(nì)運動(dòng)學分析,還有插補運動、軌跡規劃(huá)、點到點運動、裝配、搬運等實驗過程介(jiè)紹。並具有一定的實(shí)驗格式。
12.6 電控布線圖(tú)與原理圖
12.7 軟(ruǎn)件動態鏈接庫與二次開發接口、部分源代碼
12.8 其他外購設備(數控車床與元器(qì)件等)說明書







