

工業機器人機床上下料實訓平台(tái),工業機器人機床上(shàng)下料實訓裝(zhuāng)置,工
2020-09-28 09:08一、工(gōng)業機器人機床上下料實訓平(píng)台,工業機器人機床上下料實訓(xùn)裝置,工業機器人機床(chuáng)上下料實訓設備產品概述:
可作為大專院校、中(zhōng)高職(zhí)學生自動化專業、機電一體(tǐ)化專業、機器人專業、企業(yè)工程師進(jìn)行機器人、數控加(jiā)工、機器視覺檢測、材料(liào)出入倉庫進一體化組建工業(yè)4.0智能(néng)無人(rén)工廠(chǎng)培(péi)訓,提高階段綜合(hé)性(xìng)學習與(yǔ)訓練。
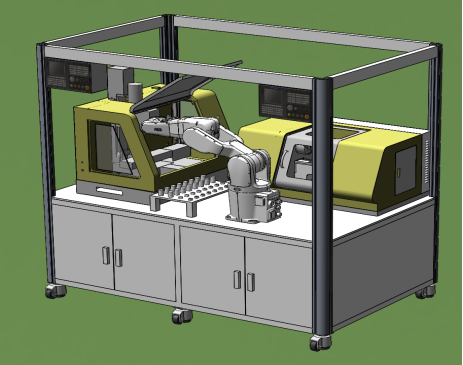
該套係統綜合性強:集工業6關節自由度機器人編程、機器視覺(jiào)編程、數控加工編程、傳感器、PLC、單片(piàn)機、通訊於(yú)一體(tǐ),將執(zhí)行機(jī)構、控製係(xì)統、驅動(dòng)係統、檢測係統及各專業學科有機結合;機器(qì)人負責數控機床的上下料工作(zuò);當其中一(yī)台數控車床零件加工完畢後,自動取出(chū),由機器人送置數控銑床上加工下一道工序,由機器人抓(zhuā)取已加工完畢的零件到視覺檢驗(yàn)區,對加工(gōng)完整性進行視覺檢測,如果符合加工(gōng)要求的零件,機器人則取出保存到合(hé)格品暫存區,否則(zé),將保存到不合格品暫存區。學生在熟練掌握該係(xì)統的操作與編程以後,也可以對係統(tǒng)加工的(de)產品進行調整或對加工後的合格產品,通過編(biān)程(chéng)由機器人完成自動裝配等工序。
三、工業機器人機床(chuáng)上下料實訓平台,工業機器人機床上下料實訓裝(zhuāng)置(zhì),工業機器人(rén)機(jī)床上下料實(shí)訓設備基本實訓項目
1、工業機器(qì)人實訓
2、數控技術實訓
3、機器人(rén)與機床通訊技術(shù)
4、機械結構訓練技術
5、氣動控製技能培訓
6、故障(zhàng)檢測技術技(jì)能培訓
7、傳感器技術及應用
8、PLC編程技術
9、機器視覺檢測技術
四、工(gōng)業機器人機床(chuáng)上下(xià)料實訓平(píng)台,工業(yè)機器人機床上下料實訓裝置(zhì),工業機器(qì)人機床上下(xià)料實訓設備係統主要配置清單
| 序號 | 名稱 | 數量 | 型號 |
| 1 | 工業6軸高速機器人本體 | 1台 |
工作半徑0.9米; 工作半徑很重要決定了,機器人能否抓取(qǔ)到工件和放下工件的位置設(shè)計; 負載 5公斤; 重複定(dìng)位精度 正負0.025mm; 每個關節的運動範(fàn)圍和速(sù)度: 關節 運動範圍 最大速度 軸1旋轉 +170°to-170° 288°/s 軸2手臂(bì) +135°to -100° 240°/s 軸3手臂 +70°to -200° 300°/s 軸4手腕(wàn) +270°to -270° 400°/s 軸5彎曲 +130°~ -130° 400°/s 軸6翻轉 +400°~ -400° 600°/s |
| 2 | 數控車削加工中心本體 | 1台 | CK210-FM 詳細參數附(fù)後(hòu) |
| 3 | 數控銑削加工中心本體 | 1台 | XK200-FM 詳細參(cān)數附後 |
| 4 | 機器視(shì)覺檢測單元(yuán) | 1套 | 由視覺相機、視覺(jiào)識(shí)別控製器、光圈、安裝(zhuāng)支架、連接電(diàn)纜等組成。控製器:機器視覺(jiào)Halcon HT-U500C機器(qì)視覺控製器;相機:500萬像素;光源:24V白(bái)色30度環形光源。 |
| 5 | 數控車床原料倉 | 1個 | CS01 |
| 6 | 數控車床成品倉 | 1個 | CS02 |
| 7 | 數控銑床原(yuán)料倉(cāng) | 1個 | XS01 |
| 8 | 數(shù)控銑床成品倉 | 1個 | XS02 |
| 9 | 西門子PLC控製器 | 1個(gè) | 6ES7 214-1HG31-0xB0 |
| 10 | 西門子PLC擴展IO模塊(kuài) | 1個 | 6ES7 223-1PL30-0xB0 |
| 11 | 威綸通觸摸屏中控台 | 1個 | MT8102IP |
| 12 | 歐姆龍繼電器模組 | 2個 | BMZ-R1 |
| 13 | 電子(zǐ)手脈 | 2個 | HLI6 |
| 14 | 車削工業級(jí)數控係統 | 1套 | 科源980TB |
| 15 | 銑削工(gōng)業級數控係統 | 1套 | 科源980MC數控係統 |
| 16 | 6軸機器人控製係統 | 1套(tào) | 本體配套 |
| 17 | 機器人底坐 | 1個 | XKF01 |
| 18 | 三(sān)爪氣動卡盤 | 1套 | SMC |
| 19 | 銑床自動夾(jiá)具 | 1套 | SH01 |
| 20 | 機床自動門推拉係統 | 2套 | KIFL3 |
| 21 | SMC 平行機(jī)械手夾爪 | 1個 | MHZL2 |
| 22 | 屏蔽電纜 | 3條 | |
| 23 | 計算機 | 1台 | CPU 係(xì)列:I7/ 內存容(róng)量:8G /硬盤容(róng)量(liàng):1T /光驅類型:DVD-ROM / 顯卡芯片:2G / 音頻係統:集成 / (帶串(chuàn)口),配(pèi)置USB鼠標鍵(jiàn)盤套裝,顯(xiǎn)示器尺寸:25英寸液晶屏。 |
| 24 | 0.6帕空壓機 | 1台 | 靜音型;500W; |
| 25 | VR虛實一體仿真實訓軟件 | 1套(tào) | 定製;詳細參數附後。 |
| 技術參數 | |
| 主要性能特點 |
使用220伏電壓,全封閉加透明有機玻璃結構(gòu)、優質鑄鐵材料鑄造、采用高精度研磨滾珠絲杆; 搭載科源(yuán)980TB工業麵板數控係統(tǒng); 執行國際通用標準G代碼(mǎ)編程,支持M代(dài)碼(mǎ)及(jí)S代碼,兼容FANUC,三菱G代碼和多種CAD/CAM軟(ruǎn)件( MasterCAM、UG、CAXA等軟件編程等); 主要加工材料:鋼件、鐵件、銅、鋁合金、PVC塑料、有機玻璃等 |
| 精度 |
重複定位精度:0.02mm 定位精(jīng)度:0.03mm 係(xì)統分辨率:0.001mm |
| XZ軸行程 |
縱(zòng)向(X軸):80 mm 橫向(Z軸):250 mm |
| 編程軟件 | MasterCAM、UG、CAXA等 |
| 主軸轉速 | 100~2000 轉/分鍾 (數(shù)控係統(tǒng)G代碼控製轉(zhuǎn)速) |
| 回轉直徑 | 210mm |
| 夾持工(gōng)件直徑 | 1-60mm |
| 主軸通孔 | 20mm |
| 電動刀架(jià)工位 | 4工位 |
| 刀架角度/精度 | 360 °/0.005mm |
| 冷卻係統 | 水冷 |
| 車螺紋功(gōng)能(néng) | 有 |
| 主軸/尾軸孔錐度 | 莫氏3號/莫氏2號 |
| 電子手輪 | 4軸三檔(dàng)電子手輪 |
| 數控係統 | 科源 980TB工業麵板(bǎn)數控(kòng)係統 |
| 主軸功率 | 500W |
| 使用電源 | AC220V/50Hz |
| 淨重(chóng)/毛重 | 180/200kg |
| 外型尺寸 | 1000×700×580mm |
| 包裝尺寸 | 1100×800×700mm |
| 隨機配件 | 冷卻係統、電(diàn)子手(shǒu)輪、三爪卡盤鑰匙、呆頂尖、內六角扳手、油(yóu)壺、雙頭扳(bān)手(shǒu)、卡盤反爪、外(wài)圓端麵車(chē)刀、機床硬件說明書、數控係統編程說明(míng)書、數控係統操作說明書 |
| 技術參數 | |
| 主要性能特點 |
全封閉加透明有機玻璃結構、優質鑄鐵材料鑄(zhù)造、采(cǎi)用高精度研磨滾珠絲杆; 搭載科源980MC係統; 執行國際通用標準G代(dài)碼編程,支持(chí)M代碼及S代碼,兼容FANUC,三菱G代碼和(hé)多種CAD/CAM軟件( MasterCAM、UG、CAXA等軟件編程等(děng)); 主要(yào)加工材料:鐵、銅、鋁合金、PVC塑料、有機玻璃等 |
| 精(jīng)度(dù) |
重複定位精度(dù):0.02mm 定位(wèi)精(jīng)度:0.03mm 係統分辨率:0.001mm |
| XYZ軸行程 |
橫(héng)向(X軸):210mm 縱向(xiàng)(Y軸):95mm 垂直(Z軸):200mm |
| 編程軟(ruǎn)件 | MasterCAM、UG、CAXA等 |
| 主軸轉速 | 100~3500 轉/分鍾 (數控係統G代碼控製轉速) |
| 工作台尺寸 | 400×90mm |
| 最大鑽孔直徑(jìng) | 13mm |
| 最大銑(xǐ)削直徑 | 16mm |
| T型槽尺寸/數量 | 12 mm/3 |
| 主軸錐(zhuī)度 | MT3 |
| 電子手輪 | 4軸三檔電子手輪 |
| 數控係統 | 科源980MC數控係統 |
| 主軸(zhóu)功率 | 350W |
| 使用電源 | AC220V/50Hz |
| 淨重/毛重 | 145/160kg |
| 外型(xíng)尺寸 | 845×580×850mm |
| 包裝尺(chǐ)寸 | 950×680×950mm |
| 隨機(jī)配件 | 鑽夾頭1個、鑽夾頭鑰匙(shí)1把、鑽夾頭鎖緊螺杆1根、T型螺母1套、內六角扳手1套、雙頭扳手1套、油壺1個、鉤頭扳手2把、頂杆1根,保險絲1個、平口鉗1個、鑽頭1個、單頭扳手1把、說明書2套、機(jī)床LED照明燈、機床硬件說明書、數控係統編程說明書(shū)、數控係統操作說明書 |
虛擬現實技術是(shì)仿真技術的一個重要方(fāng)向,是仿真技術與計算機圖形學人機接口技術多媒體技術(shù)傳感技術網絡技術等多種(zhǒng)技(jì)術的集合,是一門富有挑戰性的交叉技術前沿學科和研究領域。虛擬現實技術(VR)主要包(bāo)括模擬環境、感知、自然技能和傳感設備等方麵(miàn)。模(mó)擬環境是由(yóu)計算(suàn)機生成的、實時動態的三維立體逼真(zhēn)圖像。VR編程虛實一體化實訓平台是基於真實設備1:1建模開發(fā)並且可以代替真實機構的一套供學生學(xué)習編程及接線的綜合性軟硬(yìng)件一體化係統。設備上所有的傳感器(qì)和執行機構都能在該(gāi)係統上真(zhēn)實的(de)以三維立體方式反映出來,與實物一模一樣。還包含(hán)了帶真(zhēn)實物(wù)理屬性(xìng)的物料和機構。軟件係統中的三維(wéi)機(jī)構及(jí)傳感器,通過數(shù)據采集輸(shū)出板卡往外引出接口。學生可以像控製真實機構(gòu)那樣對其接線和編程。接口輸(shū)入輸出定義完全開放(fàng),由學生(shēng)完全自主定義。虛擬仿真(zhēn)教學係統既能采用純虛擬環境的操作麵板(人機界麵)、控製(zhì)器、硬件設備、傳感器等,所有操作都在仿(fǎng)真係統中通過鼠標、鍵盤進行操作,又能采用真實的操作麵板(人機界麵)、真實的控製器的操作來控製虛擬仿真的硬件設備、傳感器等。 以促進學生的全(quán)麵發展和適應社會需要為宗旨,以培養創新精神和實踐能力為核心,通過建(jiàn)設布局相對(duì)合理的國家級、省級和校級實(shí)驗教(jiāo)學(xué)示範中心體係,推動高等學校(xiào)實驗教學(xué)改革和實驗教(jiāo)學(xué)中心的建設與發展,實現高等教育人才培(péi)養水平的(de)整體提升。可以虛擬工業機器人、自動化加工柔性生產線等,通過對以上各工位的自(zì)動化機構建模、虛實一體編程,實現整個自動化(huà)過程的虛擬仿真(zhēn)控製。通過軟件係統的虛擬(nǐ)仿真調試,先對整個係統或某一工位進行熟悉和掌握,熟練掌握後再上真實的機構上(shàng)進行實驗,有效提高實驗效率、使真實設備得到充分利用,提高設備(bèi)經濟投入性價比,解決了設備少學員多難以開展(zhǎn)實驗實訓(xùn)的難題。
係統特點:
1、形象直觀:三維立體模型設計(jì),與真實機構一(yī)模一樣,可進行縮放、拖(tuō)動、旋轉、恢複視角等操作(zuò)。特殊部件進行(háng)了透(tòu)明處理、放大處(chù)理、可視化處理、慢動作處理等,相比實物機構更加形象直觀。
2、安全(quán)可(kě)靠:通過三維(wéi)仿真運行(háng),在完成與真實機構相同實驗的(de)同時,避免了如人(rén)身觸電安全事故、機械(xiè)運行時碰撞夾手等安全事(shì)故;沒有設備長時間運行造成的磨損、故障等;沒有(yǒu)學生誤操(cāo)作造成的設備損(sǔn)壞等;是(shì)一台永(yǒng)無故障、永無安全事故的實驗機構。
3、擴展性強:隻需通過(guò)軟件定義,不需作硬件升級,可(kě)根據學校的(de)需要擴(kuò)展其(qí)他實(shí)驗項目,不需增加硬件成本,不占用實驗室空間;並支持學校進行個性化功能定製。
4、★虛實完美結合:仿真軟件係統可(kě)硬件連接,可實現用實物示教器示教編程控製虛擬的(de)機械手及控製對像;也可以使用虛擬的示教器控製虛擬(nǐ)的機械手及控製對像;也可以使(shǐ)用虛擬的示教器控製(zhì)真實的機械手及控製對像,做到虛擬與現(xiàn)實(shí)的無縫對接。通過軟件模擬易於損壞的機構,模擬肉眼(yǎn)不方便觀察的現像,模擬具有安全事故風險的機構。解決了在純軟件實驗做完實(shí)驗後無(wú)法進行真實的調試,從沒(méi)接觸過任(rèn)硬件設備的虛幻感;同時又避免了純硬(yìng)件(jiàn)模(mó)擬實驗(yàn)現像的不直觀問題;避免了純硬件真實模型實驗機構成本高、易(yì)損壞、不直觀、存在安全事故等問題。做到了虛擬與(yǔ)現實的完美結合。
5、★身(shēn)臨其境,沉浸式體驗。佩戴上VR頭(tóu)盔則可以進入到三維虛擬場景中,觀看設備運行。可以對設備(bèi)操作(zuò),可(kě)以在場景中進行自由的行走觀看,從(cóng)各個角度觀看設備全方位的認識和了(le)解設備的機構和運作的原理。
6、★仿真軟件配置數據采(cǎi)集輸入輸出卡(kǎ),模擬真實機器(qì)人控製器(qì)的IO輸入(rù)輸出器(qì),可與(yǔ)外部真實硬(yìng)件PLC、單片機等實物相連,動手進(jìn)行實際的連線、編程、調試,保證實驗的真實性和體現感,鍛煉了學生的動手能力。
硬件參數:
1、采用微處理器AMR芯片設計,完成數據(jù)信號輸出、電平輸(shū)入、模擬量輸出、模擬量輸入、脈(mò)衝(chōng)輸出、脈衝輸入等信號。信號經光電隔離,有效防止幹(gàn)擾,可靠性好;
2、★輸(shū)出接口掛箱(xiāng):鋁合(hé)金加塑(sù)料掛(guà)箱殼體(tǐ),美觀大方;鋁合金氧化(huà)麵板工藝,通過安全插座將輸入輸(shū)出接口線引出到麵板上(shàng),麵板上標記相應的端(duān)口(kǒu)號,方便學生自定義(yì)靈活接線、靈活實驗,同時設置了排線模式接(jiē)口,可通過排線接(jiē)口一次性將所(suǒ)有連線與CPU快速連接,縮短實驗時間;
3、★信(xìn)號輸出:30路,輸出(chū)電流>2A,光電隔離輸出(chū);
4、★電平輸入信號采集:30路,檢測(cè)直(zhí)流24V輸入信(xìn)號;
5、★模擬量輸(shū)入:6路(lù)模擬量輸入采集,4-20ma/0-5V輸入采集;
6、★模擬量輸出:2路模擬量輸出,4-20ma/0-5V輸出;
7、★脈(mò)衝輸入:2路脈衝信號(hào)檢測,檢測範圍0-100KHZ,用於控製步進電機、伺服電機等;
8、★脈衝輸出:3路脈衝信號輸出(chū),輸出頻率範圍0-50KHZ,用於旋轉(zhuǎn)編碼器(qì)等設備的信號輸出;
9、通訊(xùn)方式(shì):USB通訊;
10、帶(dài)軟件(jiàn)加密狗加密;
11、VR眼鏡參數(教師機配一台,學(xué)生機以後可選配)
.1顯示屏:2個3.5英寸3K AMOLED顯示屏
.2分辨率:雙眼:2880*1600 單眼:1440*1600視場角 110度
.3調節(jiē)功能:可調整鏡(jìng)頭距(jù)離(適配佩戴眼(yǎn)鏡用戶)、可調整瞳距、可調式耳機、可調式頭帶、刷新率(lǜ) 90Hz
.4兼容係統:支持使用 SteamVR 2.0 定位係統,將(jiāng)能同(tóng)時使用最高(gāo) 4 個 Base Station,活動空間翻倍擴展至 10 平方米。
.5功能特點:傳感器 SteamVR追蹤技術,G-sensor校正,gyroscope陀螺儀(yí),proximity距離感測器,瞳距感測器
.6藍牙功能:支持藍牙,音頻輸入:內置麥克風,Hi-Res Audio認證頭戴式設備(bèi),Hi-Res Audio認證耳機(可拆卸(xiè)式),支持高阻抗耳機糾錯,接口 USB3.0,Displayport1.2。
軟件參數:
1、虛擬自(zì)動化機構、機器人本體等真實本體外形外觀一致,按(àn)照1:1的比例設計。。可實現各個方位各個角度的不同姿(zī)態的運動。
2、支持虛擬控製器仿(fǎng)真運行,也支持真實控製器在(zài)線(xiàn)監視運(yùn)行。
3、支持遠程(chéng)操作機器人。單個關節移動(dòng),線性移動多種模式移動。
4、支持單點定位移動。左側原點,右側(cè)原點,正(zhèng)麵原(yuán)點定位移動。
5、支持機器人IO讀(dú)寫操作,可讀取機器人輸入輸出狀態。可寫入。
6、支持遠(yuǎn)程狀態監(jiān)控、關節(jiē)數據監控,可讀取機器人每個關節(jiē)的角度(dù)數據。也(yě)可(kě)讀取機器人當前的操作模式和電機狀態。
7、支持(chí)多種任務選擇,可自動(dòng)切換加工工件。可自動切換機器人抓手(shǒu)工具。
8、支持VR頭盔視野和操作者電腦界麵視野(yě)同時顯示。兩者(zhě)獨立互補影響。
9、支持VR頭盔場景的手柄(bǐng)交互,和電腦界(jiè)麵的鼠標交互。兩者獨(dú)立互補影響。
10、支持真實示教器編程,也可虛擬示教(jiāo)器編程。同樣實現虛擬(nǐ)三維本體運行。
11、可實現物體的抓取、釋放、搬運。且物體具有物(wù)理屬性,重力、彈力、摩擦力等。
12、支持手動操作,自動操作兩種模式。可調節運動速度(dù)。
13、支持場景自由(yóu)旋轉、放大、縮小(xiǎo)、移動。支(zhī)持(chí)正交、透視模式。支持複位示(shì)教。
14、支持機器人碰撞檢(jiǎn)測:關節碰撞檢測、工具碰撞檢測。當發生碰撞後,高亮紅色顯示碰撞物體,並立即切斷機器人電機起到保護作用。
15、支(zhī)持虛擬邊界保護,當運動範圍超出預設的範圍邊界時。預設的(de)邊(biān)界會高亮紅色顯示。並立即切斷機器人(rén)電(diàn)機起到保護作用。
16、支持連續碰撞保護,或者連續超出邊界(jiè)保護。支持複位操(cāo)作。
17、支持運動軌跡描繪,可以將機器人運動的軌跡實時記錄並生成三維軌跡線條。讓學生更直觀的分析查看機器人(rén)運動的(de)軌跡。支持複位軌跡。
18、支持三維示教點位,可以用虛擬示教器(qì)示教,也可用真(zhēn)實(shí)示教器示教。
19、支持實訓任務的擴展。增加實訓加工的工件和工具。
20、支持外部真實(shí)環境保護係統。可外接安全門,安全光柵。
21、支持機器人所有的相關指令,直線,圓弧,關節運(yùn)動等。
22、支持TCP示教,工件坐標係建立等。
23、真實控製器連接采用標準以太網方式連接。
24、支持添加外(wài)部傳感器。







