純(chún)電動汽車電機霍爾傳感器(qì)檢測
一、新能源電(diàn)機性(xìng)能實驗台-實驗目的
1. 正確認識純電動汽車(chē)電機霍爾傳感器的作用
2. 了解純電動(dòng)汽車電機霍爾傳感器的結構
3. 對電機霍(huò)爾傳感器檢測(cè),觀(guān)察其結構,分析其工作原理,熟(shú)悉其部(bù)件。
4. 對純電動汽車電機霍爾(ěr)傳感器有一個初步(bù)的認識及掌握其檢測方法。
 二、實驗原理及說明
二、實驗原理及說明
1.萬用表功能使用(yòng)介紹。
2.汽車示波器使用介紹。
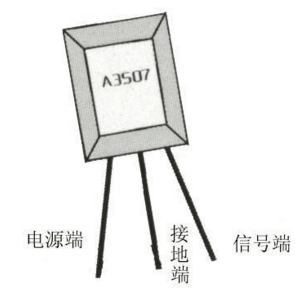
3.電機霍爾傳感器外觀圖,如圖1所示(shì)。
圖1 電機霍爾傳感器
驅動電機端線束端子含義:
電機u、v、w輸入接線(粗黃(huáng)色線為U /粗綠色(sè)線為V / 粗藍色線為W)
5線插(chā)-霍爾傳感器
細紅色線為+5V電源(yuán)
細黑色線為接地線
細黃色線為 A
細綠色線為 B
細藍色線為 C
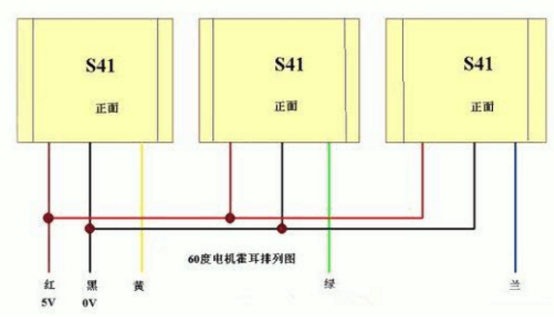
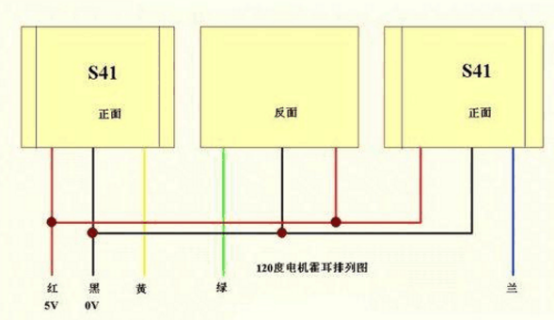
霍爾傳感器內部接線電路如圖2所示。
霍爾排列順序為正、正、正為60度電機,如是正、反、正為120度電機。
(a)60度角(jiǎo)電機接線
(b)120度角(jiǎo)電機接線(xiàn)
圖2 霍爾(ěr)傳感器內部接線
6.電機(jī)霍(huò)爾傳(chuán)感器模擬檢測
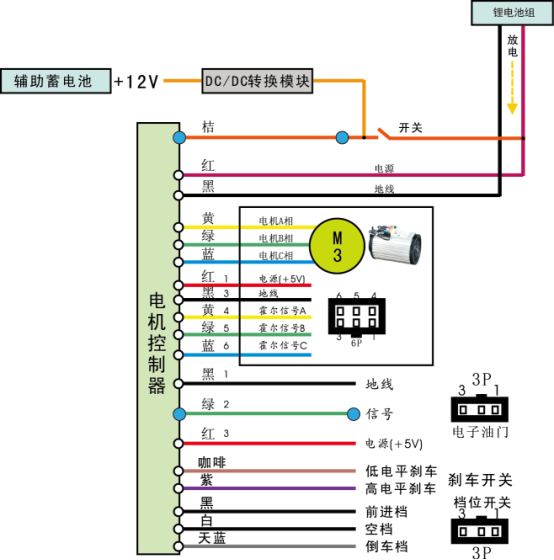
6.1電機霍爾傳感器電壓檢(jiǎn)測(電路圖如圖3所示,不加(jiā)速工況),測量電壓值;
圖3 電路圖
6.1電機霍爾傳(chuán)感器電(diàn)壓檢測(電路圖如圖3所示,加速工況),測量電壓(yā)值;
6.2電機霍爾傳感器地線與(yǔ)電源測試,電源電壓5V,電(diàn)路圖如圖3所示(shì);
6.5電機霍爾傳感器波(bō)形測(cè)試,波形如圖4所示;
圖4 電機霍爾(ěr)傳(chuán)感器波形
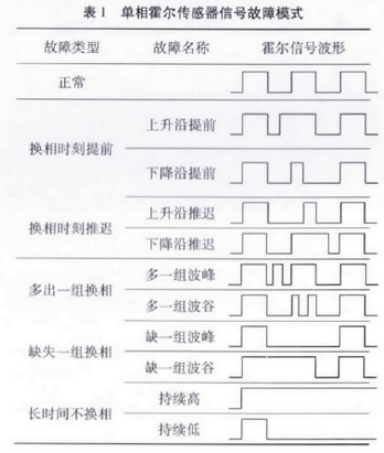
7.電機霍爾傳感器故障模擬
7.1“電機霍爾(ěr)傳感器”故(gù)障開關向(xiàng)“0”方(fāng)向按下時,設置故障。
7.2踏下電子油門,檢(jiǎn)查故障現象。
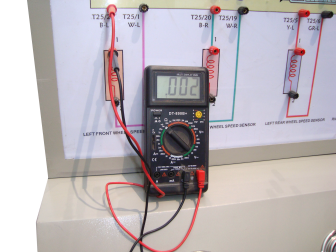
7.3萬用表檢測麵板端子,檢測線路與信號,如圖5所示。
圖5 萬用檢測 麵板對應的端子的通斷
7.4“電機霍爾傳感器”故障開關向“1”方向按下時,設置(zhì)排除。
8. 純電動汽車電機霍爾(ěr)傳感器原理
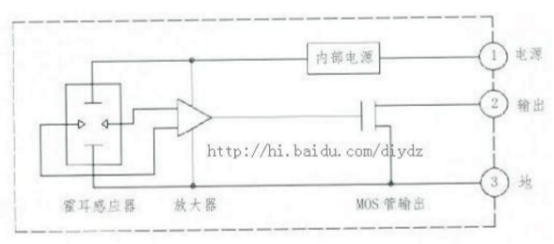
8.1線性(xìng)霍爾傳感器的(de)內部電路如圖6所示。
圖6 線性霍爾傳感器(qì)的(de)內部電路
線性霍爾電(diàn)路(lù)由電壓調整器,霍爾電壓發生器,線性(xìng)放大器和射極跟隨器組成,其輸入是磁(cí)感應強度,輸出是和輸入量成正比的電壓。靜態輸出電壓(yā)(B=0GS)是電源電(diàn)壓的一半左右。S磁極出現在霍爾(ěr)傳感器標(biāo)記麵時,將驅動輸出高於零電平;N磁極(jí)將驅動輸出低於零電平;瞬時和比例輸出電壓電平決定與(yǔ)器件最敏感麵的磁通(tōng)密度。霍耳轉把輸出(chū)電壓的大小,取決於霍(huò)耳元件周圍的磁場強度。轉動時,改變了霍耳元件周圍的磁場強度,也就改變了霍爾傳感器的輸(shū)出電(diàn)壓。
8.2電機霍爾傳感器(qì)
霍(huò)爾的信號線傳遞電機裏麵磁鋼相(xiàng)對於線圈的位(wèi)置,根據三(sān)個(gè)霍爾的信號控製器能知道此(cǐ)時應該如何給電機的線圈供電(不同的霍爾信號,給電機線圈供相(xiàng)對應方向的電流),就是說(shuō)霍爾狀態不(bú)一樣,線圈的電流方向不一(yī)樣。霍爾信號傳遞給控製器,控(kòng)製器通(tōng)過粗的導線給電機線圈供電,電機旋轉,磁(cí)鋼與線(xiàn)圈(纏在定子上的線圈,其實霍爾一般安裝在定子上)發生轉動,霍爾感應出(chū)新的(de)位置(zhì)信號,控製器粗的導線又給(gěi)電機線圈重新改變電流方向供(gòng)電,電機繼續旋(xuán)轉(線圈和磁鋼的位置發生變化時,線圈必(bì)須對(duì)應的改(gǎi)變電流方向,這樣電機(jī)才(cái)能繼續向一(yī)個方向運動,不然電機(jī)就會在某一個位置(zhì)左右擺動,而不是連續旋轉(zhuǎn)),這就是電機換相。以霍爾傳感器取代碳刷換向器,實現電機(jī)的運轉(zhuǎn),如圖7所示(shì)。
圖7 電機霍爾傳感器ABC
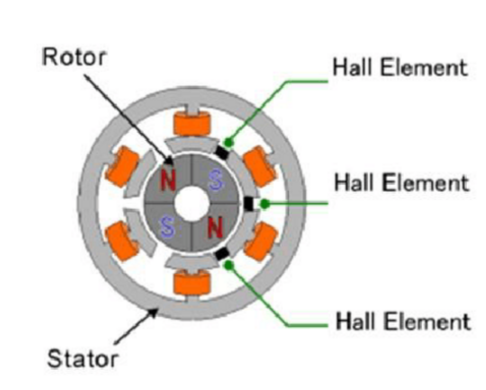
霍爾在實際電路中的位(wèi)置,如圖8所示。
圖8 霍爾在實際電路中的位置
上(shàng)圖在這(zhè)三個霍(huò)爾元件位置放置60度4極轉子,極轉子和三個霍爾元件,用於(yú)檢測旋轉。霍爾在直流無刷電機中的(de)作用是很大的,而且是關鍵部件(jiàn)。
在無刷(shuā)直(zhí)流電機中是用霍爾傳感器對轉子的位置進行檢測,並將(jiāng)位置信息發送到電機的邏輯電路中已完成繞組換向功能,使轉子持續獲得恒定動力矩。轉子上(shàng)的相鄰磁體極性各不相同,所以相同極性間的角度為90°。 旋轉的(de)永磁(cí)體轉(zhuǎn)過霍爾傳感器時會使集(jí)成(chéng)電(diàn)路的狀態發生改變,每當南極靠近時,電路就會轉為工作狀態。實際角度為120°由於磁鐵極性(xìng)變化周期為90°,所 以真正間隔角度(dù)為30°)放置的三個集成電路(lù)輸出波形。第(dì)一個集成電路會在30°時轉為工作狀(zhuàng)態,第二個和第三個分別在60°與90°時轉為工作狀(zhuàng)態。由 於北極磁鐵會通過霍爾傳感器使電路轉為釋放(fàng)狀態,而(ér)相鄰南北極相隔45°,因此,集成電路在磁鐵轉過 45°後就轉為釋放狀態(tài)。
8.3電(diàn)機霍爾位置傳感器與電(diàn)機控(kòng)製:電機內部裝有能感應磁場的霍爾傳(chuán)感器(hall-sensor),做為速度之閉回(huí)路控製,同時也做(zuò)為(wéi)相序控製的依(yī)據。
無刷直流電機的(de)工作原理本質上與(yǔ)有刷(shuā)電機類似,都是通過電機中的永磁體磁(cí)場和繞組中的電流產生驅動(dòng)力而發生轉動。不同的是無刷直(zhí)流(liú)電(diàn)機采用了位 置集成電路和電子開關替(tì)代(dài)傳統的直流電機中的電刷和換向器。由於不存在集電環或者碳刷用於換(huàn)向和摩(mó)擦,因此就不存在通過碳堆積產生的功率損耗或者電氣噪 聲。同時,電子換向在(zài)數(shù)字指令(lìng)的交互過程中也更具有靈活性。
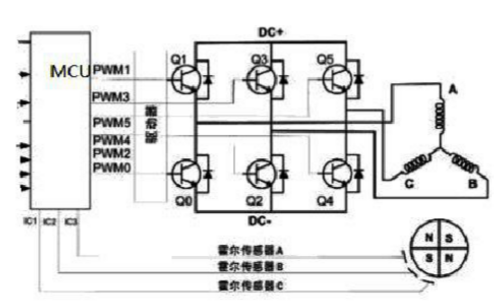
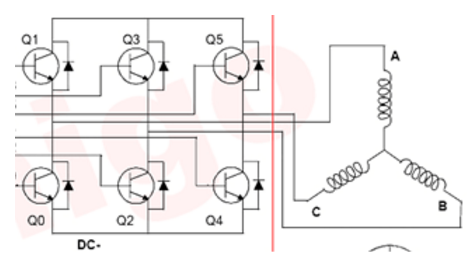
要讓電機轉動起來,首先控製部就必須根據hall-sensor感(gǎn)應到的電機轉子目前所在位置,然後依照定子繞線決(jué)定開(kāi)啟(或關閉)換流(liú)器(inverter)中功率(lǜ)晶體管的順序,如 圖9 inverter中之AH、BH、CH(這些稱為上(shàng)臂功率晶體管)及AL、BL、CL(這些稱為下臂功率晶體(tǐ)管),使電流依序流經電機(jī)線圈產生順向(或逆向)旋轉(zhuǎn)磁(cí)場,並與轉子的磁鐵相互作用,如此就能使電機順時/逆時(shí)轉動。當電機轉子轉動到hall-sensor感應出另一組(zǔ)信(xìn)號的位置時,控(kòng)製部又再開啟下一組功率晶體管,如此循環電(diàn)機就可以依同一(yī)方向繼續轉動(dòng)直到控(kòng)製部決定要電機轉子停(tíng)止則關閉功率晶體管(或隻開下臂功(gōng)率晶體管);要電機轉子(zǐ)反向則功率(lǜ)晶體管開啟順序相反。
圖9 上臂功率晶體管/下臂功率晶體管
基本(běn)上(shàng)功率晶體管的開(kāi)法可舉例如下:
AH、BL一組→AH、CL一組→BH、CL一組→BH、AL一組→CH、AL一組→CH、BL一(yī)組, 但絕不能開成AH、AL或BH、BL或CH、CL。此外因為電子零件總有(yǒu)開關的響應時間,所以功率晶體管在關與開的交錯時間要將零件的響應時間考慮進去,否則當上臂(或下(xià)臂)尚未完全關閉,下臂(或上臂)就已開啟,結果就造成上、下臂短路而使功率晶體管燒毀。
當電機轉動起(qǐ)來(lái),控製部(bù)會再根據驅動器設定的速度(dù)及加(jiā)/減速(sù)率所組(zǔ)成的命令(Command)與hall-sensor信號變化的速度加以比對(或由軟件運算)再來決定由下一組(AH、BL或AH、CL或BH、CL或……)開關導通,以及導通時間長短。速度不夠則開長(zhǎng),速度過頭(tóu)則減短,此部份工作就(jiù)由PWM來完成。PWM是決定電機轉速快或慢的方式,如何產生這樣的PWM才是要達到較精準速度控製的(de)核心。
三、實驗(yàn)儀器
實驗儀器,包括(kuò)儀器設備條件、物質條件(jiàn)、相(xiàng)關文獻資料等。
|
序(xù)號 |
名稱 |
數量 |
主要用途 |
|
1 |
新能源汽(qì)車驅動係統結構與性能實驗台 |
|
|
|
2 |
汽車電工絕緣工具組 |
|
|
|
3 |
高壓萬用表 |
|
|
|
4 |
絕緣手套(tào) |
|
|
|
5 |
汽車示波器 |
|
|
四、 實驗內容和(hé)步驟
(一)純電動汽(qì)車電機霍(huò)爾傳感器認(rèn)識
1.觀摩新能源汽(qì)車驅動係統(tǒng)結構與性能實驗台,識(shí)別電機霍爾傳(chuán)感器部件安裝位置。
2.觀摩(mó)新能源汽車驅動係統結構與性能實驗台,識別(bié)電機霍爾傳感器(qì)各引線功能。
(二)純電動(dòng)汽車(chē)電機霍爾傳感器檢測
2.1電壓(yā)檢測
1)閉合電源總(zǒng)開關,點火開關ON位置。
2)換(huàn)擋操縱機構手(shǒu)柄置於“前進/或者倒車”檔,右腳輕踩電子加速踏板,車輛前輪開始運轉(zhuǎn);
3)不踩下加速踏板,萬用表檢測霍爾傳感(gǎn)器(qì)的信號端子與地線(xiàn)電壓值。
4)踩下加速踏板,萬(wàn)用表檢(jiǎn)測霍爾傳感器的信(xìn)號端子與地線電(diàn)壓值。
5)萬用表檢測霍爾傳感器的電源端子與地線電壓值。
6)對照麵板檢測控製器端子與地線電壓值。
2.2波形測試
1)閉合電源總(zǒng)開關,點(diǎn)火開關ON位置。
2)換擋操縱機構手柄置於“前(qián)進/或者倒車”檔,右腳輕踩電子加速踏(tà)板,車輛前輪開始運(yùn)轉;
3)慢(màn)慢踩下加速踏板,示波器檢測霍爾傳感器ABC的信號(hào)端子波(bō)形且記(jì)錄。
2.3故障模擬
1)閉合電源總開關,點火開關ON位置。
2)換擋(dǎng)操縱機構手柄置於“前進/或者倒(dǎo)車”檔,右(yòu)腳(jiǎo)輕(qīng)踩電子加速踏板,車輛前輪開始運轉(zhuǎn);
3)“霍爾傳感器”故(gù)障開關向“0”方向按下時,設置故障。
4)踏下電子油門,檢查故障現象。
5)萬用表(biǎo)檢測麵板端子,檢(jiǎn)測線(xiàn)路(lù)與信號查找原(yuán)因。
6)“霍爾傳感器”故障開(kāi)關(guān)向(xiàng)“1”方向按下時,設置排除。
2.4實訓(xùn)實(shí)驗完畢後,關閉點火開關,斷開電源開關,整理好設備。
五、 實驗報告
1.如何測(cè)試電機霍爾傳感器波形?
2.如何測試電機霍爾傳(chuán)感器電(diàn)壓?正常(cháng)值是多(duō)少?
3.斷開電(diàn)機霍爾傳感器(qì)A或者B線,會有什麽故障現(xiàn)象(xiàng)?為(wéi)什麽?
4.霍爾傳感器波形記錄且分析實測數據結果。
六、 預習與思考題
1.純電動汽車組成結(jié)構(gòu)與工作原理。
2.純電動汽車電機結構與原理。
3.驅動電機霍(huò)爾傳(chuán)感器結構與原理。
其他產品鏈接(jiē):
加強中職學生對弱電與強電認識
好氧堆肥實驗裝置使用說明(míng)
電(diàn)機(jī)及電氣技術實訓裝置
傳感器實驗台溫度控製儀表操作說明
太陽能光伏發電綜合實訓係統使用說明(míng)
電動機技術工作原理及運行維護
電機與拖動實驗實訓報告
光機電一體化實訓設備實驗室介紹(shào)
機械設計實驗室
齒輪範成儀使用說明書
基礎電工電子實驗室設備
定製熱管換熱器實驗台
家用電器(qì)之電子消毒櫃實(shí)驗指導書(shū)
物聯網射頻識別綜合應用實驗(yàn)箱
初級維修(xiū)電工實驗台
臭氧氧化脫色實驗(yàn)說明書
萃取(qǔ)精餾(liú)教學(xué)實驗指導書
二氧化碳PVT關係測定(dìng)實驗指導書
空氣絕熱(rè)指數測定裝置實(shí)驗指導書
填料吸收實驗裝置使(shǐ)用指導(dǎo)書
超濾、納(nà)濾、反滲透多(duō)功能膜分離實(shí)驗裝置說明
孔口(kǒu)管嘴實(shí)驗儀說明書
熱電偶製作校驗儀說明書
好氧堆肥實驗裝置實驗說明書
沿程阻力係數測定裝置說明書
文丘(qiū)裏除塵器性能實驗指導書
製冷壓縮機性能測試實訓裝置指導書
化工傳熱(rè)實驗裝置使用說明書
數據采集板(bǎn)式靜電除塵器指導(dǎo)書
《台虎鉗》實測繪圖組合(hé)訓練裝置
自由對(duì)流橫管管外(wài)放熱係數測試裝置使用說明書
流體力學綜合(hé)實驗(yàn)裝置使(shǐ)用說明書
《典型零件(jiàn)》實測繪(huì)圖訓練裝置
製冷製熱工作原理及實驗目的
挖掘機液壓模擬訓練平台(tái)操(cāo)作說明
中溫法向輻射率測量儀實驗裝置的介紹及使用說明
傳感器實驗台的(de)特點及維護
熱電偶校驗儀使(shǐ)用說(shuō)明
熱電阻校驗裝(zhuāng)置使用(yòng)說明(míng)
做(zuò)燃料電池教具實驗要注意什麽
電機及電氣(qì)技術實驗的基本要求及安全操作規程
交流及直流電源實驗操作說明
傳感器實驗台溫(wēn)度控製儀表操(cāo)作說明
衝擊水浴(yù)除塵器實驗裝置使用說明
變(biàn)壓器耦合推挽功率放大器(qì)實(shí)驗說明
平麵磨床麵板器件布局圖及電路實訓單元故障現象



 品(pǐn)牌理(lǐ)念
品(pǐn)牌理(lǐ)念  標準流程
標準流程  有效溝通
有效溝通 專業管(guǎn)理
專業管(guǎn)理 優秀團隊
優秀團隊 品質(zhì)保證
品質(zhì)保證 無憂售後
無憂售後 