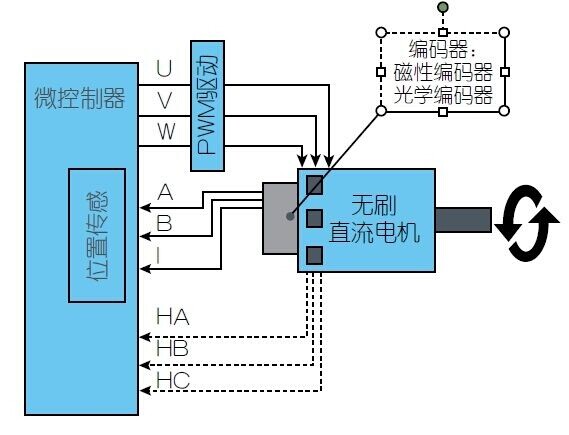
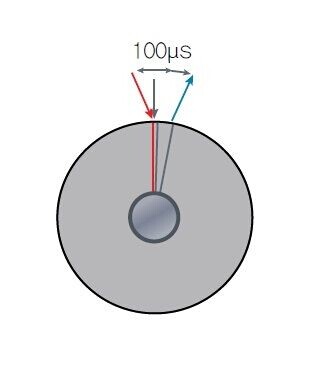
當(dāng)固定線圈磁場(chǎng)與轉子磁場相互(hù)垂直時,力矩達到最大值(zhí)。所測量(liàng)的轉(zhuǎn)子角度反饋到通過固定線圈控製電流的係統(見圖1),產生(shēng)一個垂直磁場。
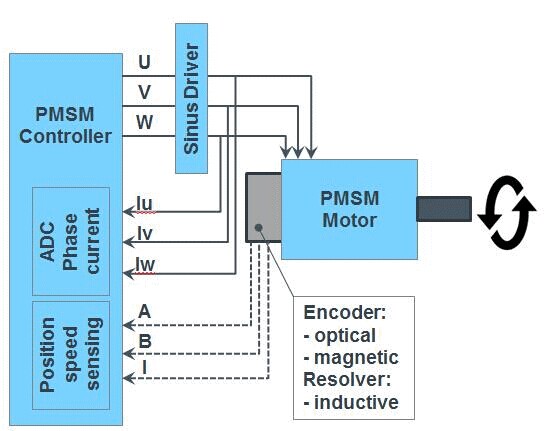
圖1:一個無刷直流電(diàn)機控(kòng)製係統需要通過(guò)磁性位置傳感器(通常用於汽車領域)或光學位置在多數高端(duān)應用中,無刷直流電動機正(zhèng)在被永磁同步電動機(PMSM)所取代。永磁同步電動機代替了無刷直流電動機中受轉矩脈動影響的模塊換相方案,而且能在線圈之間自如切換(huàn),減少振(zhèn)動(dòng),獲(huò)得(dé)更高的效率。
Fig. 2: A PMSM draws on a similar feedback loop to a BLDC motor's.當然,盡管(guǎn)工業自動化(huà)和汽車電動機設計的效率和可靠性必須經(jīng)常得到優化,許(xǔ)多其他電動機,尤其是消費(fèi)產品領域的電動機還是最注重成本。對於簡單的電動機來說,霍爾(ěr)開關陣列提供了合適的位置測量方法,也能產生適當的力(lì)矩,使操作變得流暢。


 品牌理念
品牌理念  標準流程
標準流程  有效溝通
有效溝通 專業管理
專業管理 優秀團隊
優秀團隊 品質保證
品質保證 無憂售後
無憂售後 